- @QQ1928499906
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
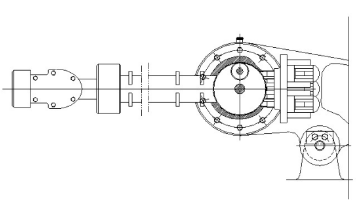
本文分析了工业机器人的机械结构及其传动系统设计。首先概述了机器人由机构部分、传感器组、控制部分及信息处理部分构成,重点阐述了六自由度运动原理。详细介绍了第一轴(大臂)采用三级斜齿轮传动的设计方案,包括传动比分配(2.4×4.87×5.7)和齿轮参数计算(材料40Cr,7级精度)。第二轴通过一级齿轮传动实现左右摆动,第三轴完成上下摆动。文章还涉及转角控制设计(0-270°挡块结构)以及第一臂与底座的
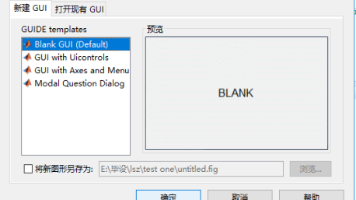
本文研究了基于MATLAB的语音识别系统设计。系统采用高斯混合模型(GMM)进行语音信号建模,通过MFCC参数提取语音特征,并利用MATLAB GUI实现可视化界面。论文详细介绍了GMM的数学原理、MFCC特征提取流程以及GUI界面设计方法。实验结果表明,该系统能准确实现语音识别功能。虽然当前语音识别技术仍存在环境噪声干扰等问题,但其便捷高效的特点使其在移动互联网应用中具有广阔前景。未来研究将致力
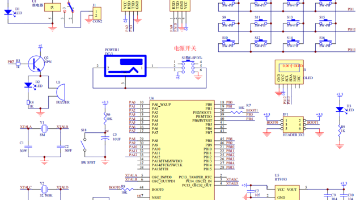
本文设计了一款基于STM32F103C8T6的视频识别门禁控制系统。系统采用OV2640摄像头实现人脸识别功能,结合矩阵键盘输入、蜂鸣器报警、OLED显示和蓝牙模块等组件,构建了一套智能化门禁解决方案。硬件设计使用Altium Designer16完成电路原理图绘制,软件部分包含主程序、初始化、键盘扫描等多个功能模块。系统支持人脸信息管理、密码验证、异常报警等功能,并通过蓝牙实现远程控制。相比传统
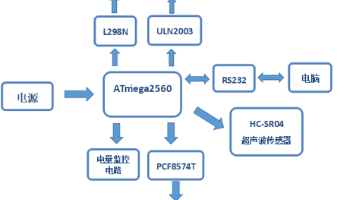
本文设计了一种基于ATmega2560控制板的智能拖地机器人系统。系统采用Arduino Mega 2560作为核心控制器,通过RS232串口与电脑通信,配合L298N和ULN2003电机驱动模块实现避障行进和抹布运动功能。系统包含电量监控电路、LCD1602显示屏、HC-SR04超声波传感器和LM2596S降压芯片等模块。硬件设计包括控制板最小系统电路和驱动板电路,通过Altium Design
本文介绍了一套基于PLC的智能码垛控制系统设计方案。系统采用西门子S7-1215C PLC为核心控制器,集成了视觉识别、六轴工业机器人和自动码垛平台,实现物料的高效精准堆叠(效率≥120件/小时,精度±1mm)。系统包含硬件设计(视觉层、控制层和执行层)、模块化控制逻辑(视觉定位、机器人路径规划等)以及性能测试结果(识别成功率99.2%,能耗降低18%)。经实际验证,该系统可显著提升仓储空间利用率
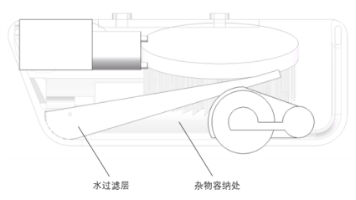
本文设计了一种新型自动拖地机器人,针对现有产品渗水过多、更换抹布麻烦等问题进行了改进。采用履带式拖地结构,配备自动清洗、挤压脱水、脏水过滤和垃圾收集等功能。重点优化了行走机构设计,通过辅助轮与履带配合解决转向阻力问题。机器主体采用模块化设计,包含挤压机构、清洗刷、过滤系统等核心组件,并详细介绍了各部件的布局原理。文章还通过SolidWorks运动仿真验证了机器人的直线行走和避障功能,最后展示了简易
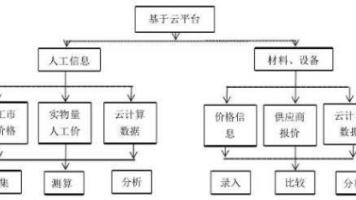
摘要 本研究探讨了云计算技术在工程造价管理中的应用,重点分析了其在工程计量与计价方面的优势。研究表明,云计算通过虚拟化技术、并行计算和分布式存储等手段,显著提升了资源利用效率和数据计算能力,有效解决了传统工程造价信息化进程中共享率低、信息挖掘不充分等问题。在工程计量方面,云平台支持定额库智能更新、多用户协同和实时数据校验;在工程计价方面,则实现了市场价格动态采集、智能分析和精准定价。研究证明,云计
基于深度学习的口红识别系统设计与实现 摘要:本文介绍了一种基于深度学习的口红识别系统,该系统通过人脸检测、面部特征点标记和颜色对比三个核心模块实现口红色号的自动识别。系统采用Faster R-CNN等算法进行人脸检测,定位68个面部特征点提取唇部区域颜色,并与口红色库进行匹配。测试结果表明,该系统能有效识别口红色号,具有操作简便、实用性强等特点,可满足用户对口红色号识别的需求,在美妆领域具有应用价
本文设计了一种基于STM32F103C8T6的智能快递存取系统,集成了GSM短信通信、TFT彩屏显示、语音播报和舵机控制等功能模块。系统通过矩阵键盘实现人机交互,支持工作人员密码验证存取和用户取件码取件两种模式,并自动发送短信通知。硬件设计包括单片机核心电路、矩阵键盘模块等,软件采用C语言编程实现流程控制。系统调试通过后,可完成快递存取、信息显示和语音提示等完整业务流程,具有操作便捷、安全性高等特

本文介绍了一种基于单片机的防火防盗报警系统设计方案。该系统以AT89C52单片机为核心,集成了烟雾传感器、温度传感器、人体红外传感器和门磁传感器等多重检测模块,通过实时监测环境参数实现火灾和入侵行为的早期预警。系统采用本地声光报警(蜂鸣器+LED)和远程无线通知(ESP8266 WiFi模块)相结合的方式,具备双模式切换(离家/在家)、误报过滤和报警记录等功能。硬件设计注重成本效益和可靠性,软件采