- @Ohana_0
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文介绍了一个标准的目标跟踪模型训练-测试-分析流程。训练阶段通过train.py脚本生成checkpoints和日志文件,包含超参数配置、损失曲线和定期保存的模型。测试阶段独立运行test.py,指定模型权重和结果保存路径,输出跟踪结果和可视化图像。分析阶段运行analysis.py计算精确率、准确率等指标,并生成评估结果文件。整个流程采用模块化设计,训练、测试、分析相互独立,通过文件进行数据传
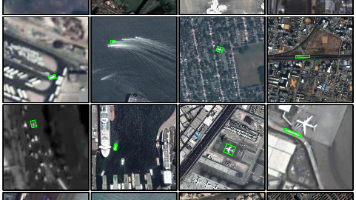
本文系统综述了卫星视频单目标跟踪(SOT)的研究进展,针对现有方法在旋转目标跟踪上的不足,提出了首个卫星视频旋转目标跟踪基准OOTB。该基准包含110段视频序列(29890帧),覆盖车辆、船舶、飞机和火车四类目标,所有帧均采用旋转包围框(OBB)标注,并定义了12类细粒度属性。通过评测33种前沿跟踪器(58个模型)发现:基于孪生网络的跟踪器性能最优;旋转、完全遮挡和背景杂波是最具挑战性的场景;融合
本文对比了三种目标跟踪模型架构:STARK采用编码器-解码器Transformer实现端到端无锚点跟踪;AQATrack引入查询向量传播机制;SeqTrack将跟踪转化为序列生成问题。性能上,AQATrack精度最高(71.4%AUC),STARK最轻量(43.4M参数),SeqTrack训练最稳定。应用场景方面,STARK适合资源受限环境,AQATrack适合高帧率需求,SeqTrack便于多模
本文记录了SeqTrack项目配置和训练过程中遇到的问题及解决方案。主要问题包括:1)TensorboardX警告提示,原因是较新PyTorch已内置TensorBoard功能;2)路径斜杠使用问题,发现正反斜杠在配置中均可正常使用;3)训练过程中实时输出显示多边形转边界框的处理进度。通过监控训练日志可查看训练指标,包括FPS、总损失和IoU值。整体解决方案包括忽略警告、保持路径配置不变以及补充必
本文介绍了一个标准的目标跟踪模型训练-测试-分析流程。训练阶段通过train.py脚本生成checkpoints和日志文件,包含超参数配置、损失曲线和定期保存的模型。测试阶段独立运行test.py,指定模型权重和结果保存路径,输出跟踪结果和可视化图像。分析阶段运行analysis.py计算精确率、准确率等指标,并生成评估结果文件。整个流程采用模块化设计,训练、测试、分析相互独立,通过文件进行数据传
本文总结了PyTorch GPU环境配置、数据集处理及常见错误的解决方案。主要内容包括:1)将PyTorch从CPU版转为GPU版的操作步骤,需注意CUDA版本匹配;2)数据集处理技巧,如GOT-10k数据集的使用和OOTB数据集的代码修改;3)常见错误排查,如分布式训练环境变量设置、内存不足、路径错误等问题。还涉及手机USB网络共享、Visdom安装等实用问题的解决方法。这些经验对深度学习环境搭
典型指标提升包括旋转IoU(R-IoU)平均提高15-20%,特别适用于船舶、飞机等长宽比悬殊的目标。四类核心目标的mAP可达78.3%(汽车)、82.1%(船舶)、80.7%(飞机)和75.9%(火车),但对未训练类别(如建筑物)的误检率高达25-30%。在测试集包含的12类干扰场景中,模型对云雾遮挡(保持85%以上召回率)、低对比度(AP下降不超过5%)和运动模糊(误差增幅<8%)等卫星视频典
本文介绍了AQA-Track项目环境配置及参数修改流程。首先通过Anaconda创建环境并安装依赖,使用PyCharm建立项目后解决可能的模块缺失问题。重点说明了配置文件修改要点:包括yaml文件中采样率、训练轮数、批量大小等参数调整方法,以及在代码中添加新数据集支持的具体步骤(需在base_functions.py等文件中导入数据集类并修改相关函数)。最后提示完成上述配置后即可运行项目,配置过程