




- @OICQQ67658008
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
采用深度学习方法来实现 使用Yolov5训练太阳能电池板缺陷数据集 并构建和训练一个深度学习模型来进行EL图像缺陷识别 太阳能电池组件图像 EL图像缺陷识别 识别算法

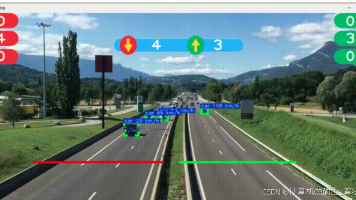
它基于YOLOv8,通过加入DeepSORT算法实现目标跟踪,同时还改进了YOLOv8的单目测距及速度测量技术和流量计数功能。该系统可以通过摄像头或视频源实时捕获图像,并自动检测和跟踪交通中的车辆、行人等目标。在检测到目标后,系统会根据目标在图像上的大小进行单目测距,推算出目标与摄像头之间的距离。同时,系统还可以根据目标的运动轨迹和时间间隔计算出目标的速度。这些测量数据可以为交通管理提供有用的参考
采用机器学习或深度学习方法处理振动信号,使用风力电机异音诊断数据集来构建一个智能检验算法_jia假设你有下面这个数据集风力电机异音诊断数据集【数据背景】在风力电机生产线上普遍采用人工听音的方法分辨良、次品,不仅成本高,而且重复、单调的听音工作极易引起人员疲劳,容易出现误判,若个别不良品混入整批成品中,会给工厂带来严重经济损失,甚至严重影响产品声誉。
采用机器学习或深度学习方法处理振动信号,使用风力电机异音诊断数据集来构建一个智能检验算法_jia假设你有下面这个数据集风力电机异音诊断数据集【数据背景】在风力电机生产线上普遍采用人工听音的方法分辨良、次品,不仅成本高,而且重复、单调的听音工作极易引起人员疲劳,容易出现误判,若个别不良品混入整批成品中,会给工厂带来严重经济损失,甚至严重影响产品声誉。
本文提出基于YOLOv8深度学习模型的舰船目标检测与速度反演方案。使用包含12,000张带尾迹船只图像的数据集,通过YOLOv8训练船只目标检测模型,并探讨从尾迹特征反演船速的方法。方案包括数据准备(YOLO格式标注)、模型训练配置、检测推理流程,同时指出需结合图像处理技术和流体力学模型实现速度估计。该方法为水面舰船监测提供了一种可行的技术路线。
数据收集与预处理下载并合并四个数据集。对数据进行清洗和预处理,包括去噪、归一化等。特征提取将原始心电信号转换为适合模型输入的形式。模型构建构建CNN、LSTM和GRU模型。训练并评估每个模型的表现。结果分析比较不同模型的性能指标,如准确率、精确率、召回率、F1分数等。可视化可视化训练过程中的损失和准确率曲线。可视化混淆矩阵。部署创建一个简单的GUI界面来进行实时预测。通过上述 MATLAB 代码,