- @MotroEngineer
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
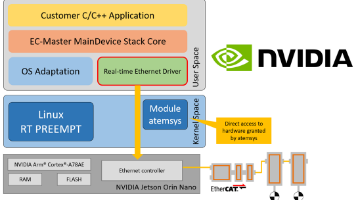
摘要:本文探讨了人形机器人开发中AI计算与实时控制的协同挑战,提出了基于acontis实时技术的解决方案。通过优化NVIDIA Jetson平台的EtherCAT驱动,降低CPU占用率,实现AI推理与底层控制的资源平衡;构建ROS2与EtherCAT的无缝集成框架,支持传感器数据的高频采集和安全通信;提供EC-Simulator工具实现数字孪生调试。该方案为人形机器人建立了稳定高效的"神经系统",
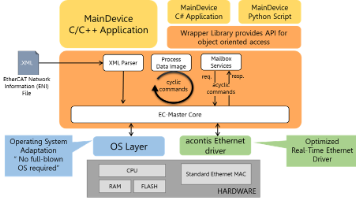
摘要:人形机器人技术快速发展,对底层控制系统提出了更高要求。EtherCAT凭借微秒级实时性、分布式时钟同步和灵活拓扑结构等优势,成为理想解决方案。acontis提供的EC-Master协议栈和EC-Engineer工具链,支持多平台开发与高效调试,助力实现机器人运动控制中的高精度同步、实时反馈和复杂姿态调整。随着人形机器人应用场景拓展,EtherCAT技术将为其产业化提供关键支撑。

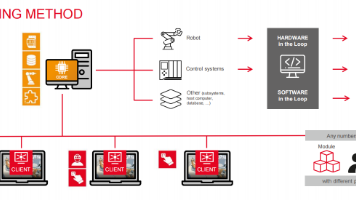
fe.screen-sim平台采用Core+Client架构与生成式AI技术,实现工业数字孪生的全自动构建。该平台通过AI自动解析CAD模型,完成对象分类、运动学建模、控制逻辑生成等复杂流程,将传统手动配置转变为数分钟完成的智能化工程。Core模块作为仿真中枢处理底层计算,Client模块提供交互界面,支持多用户协同开发。这种架构既保障了系统性能,又为生成式AI应用提供了支撑,显著提升了虚拟调试效

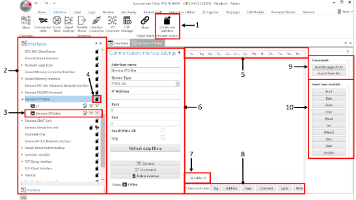
虚拟调试与fe.screen-sim通信接口配置指南 工业自动化中,虚拟调试通过数字孪生技术提前验证PLC与机器人程序,降低现场风险。本文以fe.screen-sim为例,详解其通信接口通用配置方法并通过Generate Axes生成轴信号,关联Motion Joints,并可通过Excel导入信号表(需固定格式)。
摘要:人形机器人技术快速发展,对底层控制系统提出了更高要求。EtherCAT凭借微秒级实时性、分布式时钟同步和灵活拓扑结构等优势,成为理想解决方案。acontis提供的EC-Master协议栈和EC-Engineer工具链,支持多平台开发与高效调试,助力实现机器人运动控制中的高精度同步、实时反馈和复杂姿态调整。随着人形机器人应用场景拓展,EtherCAT技术将为其产业化提供关键支撑。
摘要:本文探讨了人形机器人开发中AI计算与实时控制的协同挑战,提出了基于acontis实时技术的解决方案。通过优化NVIDIA Jetson平台的EtherCAT驱动,降低CPU占用率,实现AI推理与底层控制的资源平衡;构建ROS2与EtherCAT的无缝集成框架,支持传感器数据的高频采集和安全通信;提供EC-Simulator工具实现数字孪生调试。该方案为人形机器人建立了稳定高效的"神经系统",
本文探讨虚拟调试与数字孪生技术应用中的软件授权成本问题,介绍F.EE旗下fe.screen-sim平台的创新解决方案。其Core-Client架构实现核心组件单点激活与多客户端复用,配合灵活的Online/Offline授权模式,有效解决传统工业软件"单机绑定闲置""套包捆绑"和"环境割裂"等痛点。管理员机制支持模型资产复用与权限管理,通
本文探讨了NVIDIA在物理AI与机器人技术领域的生态布局,重点分析了其Jetson边缘计算平台与EtherCAT工业总线技术的深度整合。文章指出,虽然NVIDIA提供了强大的AI算力,但实现精准的物理控制需要acontis公司的EC-Master解决方案提供硬实时通信支持。作为acontis在中国的合作伙伴,盟通科技致力于为亚太地区企业提供本土化的技术支持。
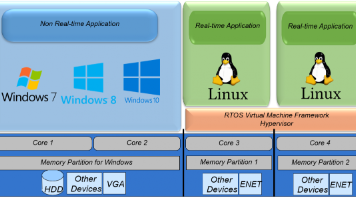
Windows实时扩展技术迎来革新:基于Hypervisor的Windows+Linux-RT并行架构正成为工业控制新标准。传统方案依赖封闭RTOS环境,存在生态贫瘠、学习成本高等问题。LxWin方案通过Hypervisor实现硬件资源硬隔离,将Windows与Linux-RT并行运行,确保实时任务不受Windows系统干扰。该方案支持50微秒级周期时间,兼容主流工业协议和开源生态,同时允许开发者
本文对比分析了开源与商业级EtherCAT主站协议栈的技术差异。开源方案(IgH/SOEM)虽成本低,但在高精密控制场景面临实时性调优、时钟同步补偿和工具链缺失等工程挑战。商业方案(如EC-Master)提供全栈闭环支持,包括微秒级实时内核适配、高级总线特性和图形化工具链,显著缩短开发周期。文章建议研发团队根据项目需求,在成本与效率间权衡,优先考虑能释放核心研发资源的解决方案,并推荐联系供应商获取