- @Lovely_him
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
课程设计 - 运动控制卡(云服务器)2021.06.18,今天课设答辩,昨晚肝到凌晨1:48左右。现在越来越对晚睡没什么概念了,特别是当熄灯权完全掌握在自己手上之后。本笔记是对我的课设——《运动控制卡》 的总结。包含制作流程、教程、思路等。一、任务要求课设要求使用单片机制作运动控制卡,需要使用网线(以太网)接口通讯,实现功能是控制多轴步进电机,实现加减速走直线、弧线(含直线插补、圆弧插补)。同时需
前言:第三天,老师结合ppt文图详细讲解了线性和卷积网络的构建,由简单到复杂的讲解卷积网络的发展。最后结合几个项目加深理解。愈发感觉老师讲的好了。第二天的课听完后还感觉自己什么都懂了,结果轮到自己动手搭建模型时发现自己的无知,所以今天要把各个知识点详尽列举。这里写目录标题【AI Studio】飞桨图像分类零基础训练营 - 03 - 图像分类基础一、建立模型1.神经元2.激活函数3.前馈神经网络 /
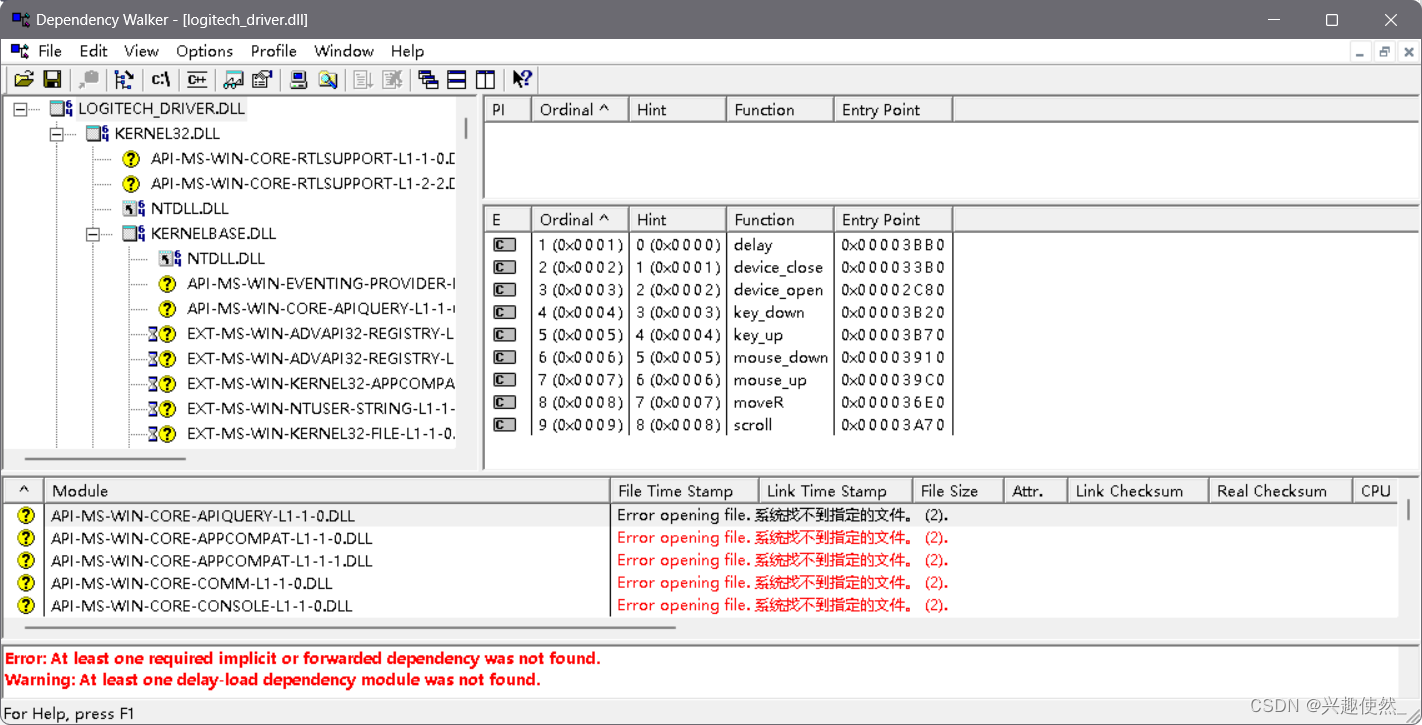
使用 罗技动态链接驱动库DLL 控制 键鼠
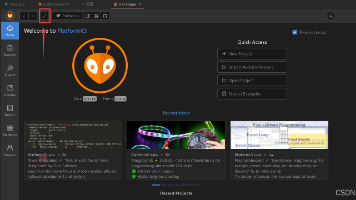
我发现用 PlatformIO + Arduino ,貌似是为了它的库和c++环境,对于esp-idf和Arduino的反而不太重要?而且Arduino本身底层还是esp-idf,所以直接把esp-idf的代码拷贝过去就能用,c++对c向下完美兼容。
官方手册里明确规范了不同层的函数名与参数名的习惯定义,方便一眼知道作用,增加可读性。层层嵌套是为了移植性,编译时自动根据选择芯片切换不同的LL层,HAL及其以上组件是共用的。api的调用需要自行确保不冲突,使用rtos的互斥或信号量等保护。fill:#333;color:#333;color:#333;fill:none;important;important;important;importan
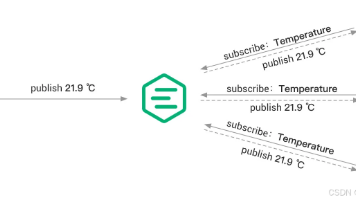
MQTT(Message Queuing Telemetry Transport)是一种轻量级的 物联网(IoT)通信协议 ,专为低带宽、高延迟或不稳定的网络环境设计
本教程讲解了官方例程, 优化和注释代码, 补充盲区知识

在 SPIFFS(SPI Flash File System)中,常用的文件操作接口可以按 二进制模式 和 文本模式 分为两类

本文介绍了ESP-IDF开发中组件配置与管理的实践方法。首先通过模板创建新工程并验证基本功能,随后演示了两种组件添加方式:使用乐鑫组件注册表添加官方组件(如led_strip和button组件)和手动创建自定义组件。重点讲解了组件路径管理规范,包括默认组件搜索路径和EXTRA_COMPONENT_DIRS设置方法,以及通过CMakeLists.txt实现组件间的依赖关系。文章强调应遵循"
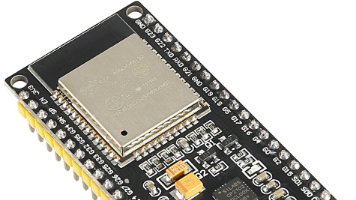
esp 入门 第一个工程