




- @LOYISHEN
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
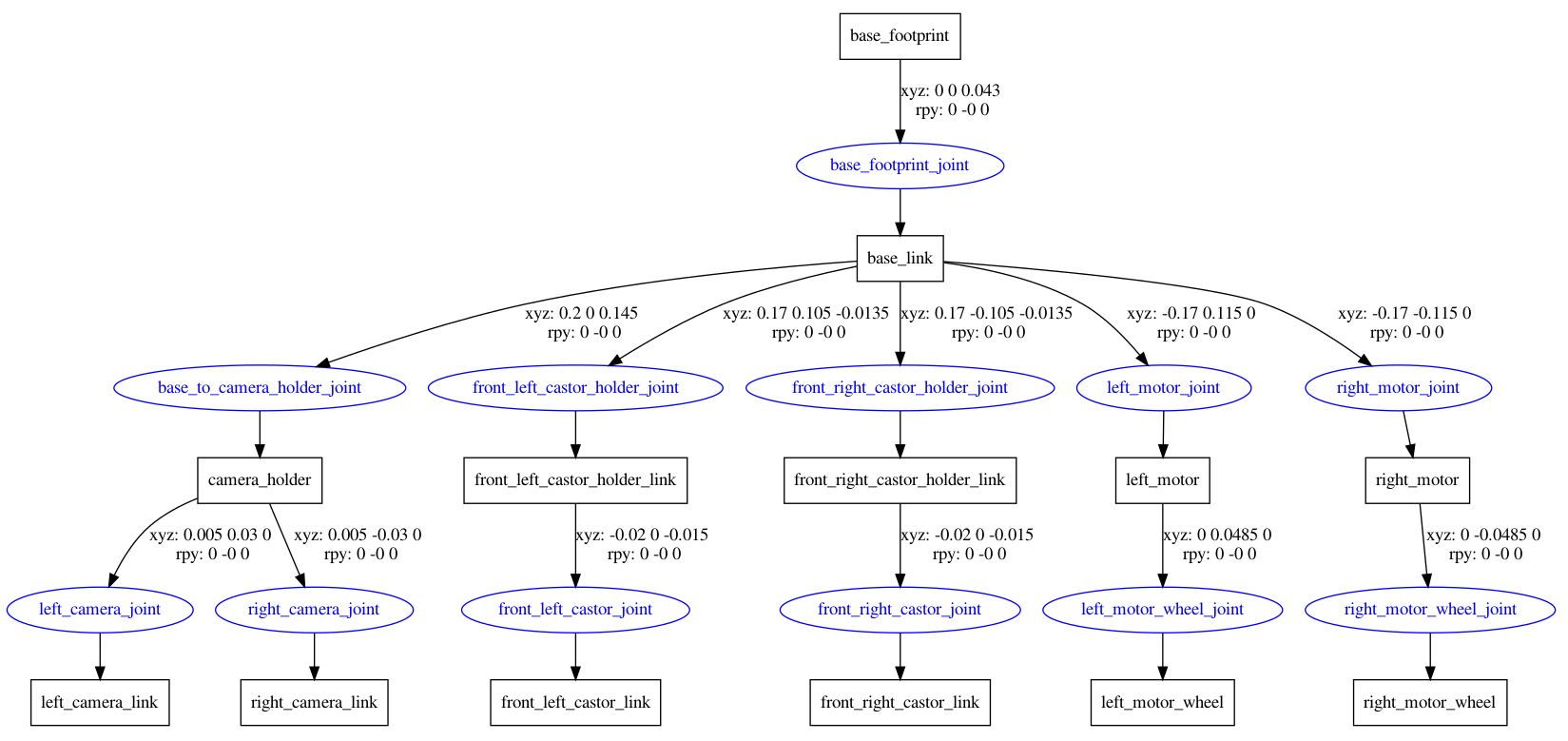
ROS 总结报告文章目录ROS 总结报告小车建模小车本体建模基础知识萝卜机器人建模添加差速轮控制仿真插件添加摄像头仿真插件初探摄像头仿真插件发布两个摄像头话题3D 视觉摄像头标定深度图生成与摄像头话题进行通信获取话题数据转换数据机械臂控制机械臂建模使用 MoveIt 配置机械臂加载机械臂 URDF 模型配置自碰撞矩阵配置虚拟关节创建规划组定义机器人位姿配置终端夹爪配置无用关节设置作者信息生成配置文
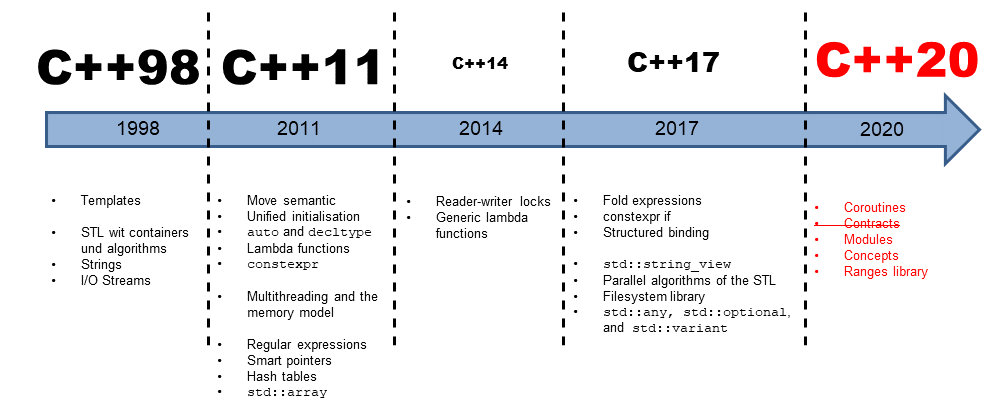
本文翻译了 Rainer Grimm 在 https://www.modernescpp.com/ 中写的 “The Next Big Thing: C++20” 这篇文章
看雪 kctf game 第16关的解题思路分享

本文通过修改按键映射配置文件名解决了 yuzu 软件点击 “设置” 闪退的问题

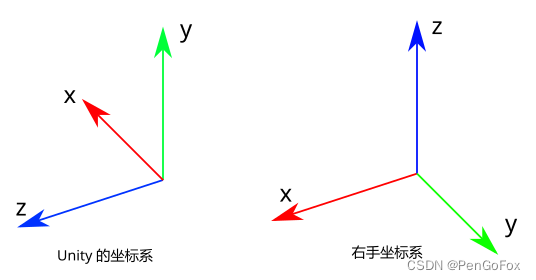
Unity 坐标系和右手坐标系的位姿(位移和姿态)的相互转换,使用向量来表示位移,使用四元数来表示旋转。
ROS 生成深度图文章目录ROS 生成深度图简介双目摄像头测距与 OpenCV 简介双目测距原理准备双目测距准备ROS 的摄像头仿真ROS 获取仿真摄像头的固定属性数据生成深度图设置相机属性参数生成深度图使用 python 获取话题的图像数据把话题数据转换为可以显示的图像数据根据图像数据生成深度图参考代码参考文献简介双目摄像头测距与 OpenCV 简介人眼能够区分远和近的物体,靠的就是两只眼睛的配
本文描述了如何在 STM32CubeIDE 添加 IQmath 并正确编译使用
本文图片均来自对应的链接的截图前言做小毕设,我是做前端部分的,有一个头像上传的功能,我想做一下预览功能,但是发现浏览器不让直接加载本地文件,就只能上网找答案了。其实我平时都不怎么写博客的,但是吧,遇到这个问题之后,看到的都是你抄我,我抄你的,还不是我想要的解决方案,最后我用一个简单的办法解决了之后,就,觉得那些互抄的答案真的…解决方案用一个 FileReader 把文件读进来,然后再放到图片的 s