




- @JamesYu2022
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
2022年11月30日,当ChatGPT上线仅仅五天就突破百万用户时,全世界都意识到:一个新的技术时代已经到来。然而,这场AI革命的种子,早在半个多世纪前就已经埋下。从图灵的"机器能否思考"到今天能够撰写文章、编写代码、分析数据的大语言模型,人类在人工智能道路上走过了漫长而曲折的征程。
机器视觉与计算机视觉:算法的边界与产业格局深度解析

波士顿动力公司(Boston Dynamics)作为全球移动机器人领域的领导者,其产品以卓越的运动能力和动态平衡技术闻名于世。本文系统介绍了波士顿动力的三大核心产品:四足机器狗Spot、物流机器人Stretch和人形机器人Atlas。2026年1月,波士顿动力在CES展会上首次公开演示了全新电动版Atlas产品版本,标志着人形机器人正式进入商业化阶段。Atlas配备56个自由度,可举重110磅(5
在工业4.0和智能制造的浪潮下,产品质量控制成为制造企业的核心竞争力。传统的人工检测方式存在效率低、漏检率高、成本高昂等诸多痛点,已无法满足现代化生产线的严格要求。随着人工智能技术的快速发展,基于深度学习的机器视觉AI外观缺陷检测技术应运而生,为工业质检领域带来了革命性的变革。这项技术通过高精度图像采集、智能算法分析和自动化判断,实现了对产品表面缺陷的快速、准确识别,正在成为智能工厂质量管理的重要
在数字时代,当我们凝视屏幕上一幅绚丽多彩的照片时,我们看到的不仅仅是风景,而是一场宏大的线性代数运算。从17世纪的方程组研究到现代的深度学习,线性代数已经演变成了描述、处理和理解图像的通用语言。
机器视觉与计算机视觉:算法的边界与产业格局深度解析
本文系统分析了特斯拉全自动驾驶系统(Full Self-Driving, FSD) v14版本的技术架构、开发过程及性能表现。FSD v14标志着特斯拉从传统模块化架构完全转向端到端神经网络方案,同时依托先进的纯视觉系统实现环境感知。研究表明,v14在关键脱离里程方面实现了20倍以上的性能提升,从v13的441英里提升至9,200英里以上,展现了端到端学习范式的巨大潜力。本文深入探讨了系统的神经网
当我们享受着AI带来的便利时,很少有人意识到,每一次与ChatGPT的对话、每一张AI生成的图片背后,都有庞大的算力中心在昼夜不停地运转。这些被称为"数字时代发电厂"的设施,正在成为全球能源消耗的新主力军。面对日益严峻的能耗问题,算力中心的未来究竟该何去何从
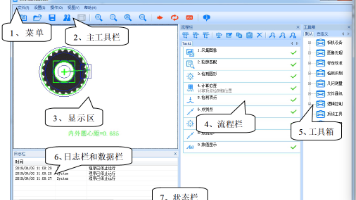
本文通过代码示例详细介绍了 CKVision SDK 中基于 CKDetect.dll 模块实现 OCV(光学字符验证) 的技术流程,重点阐述了其与 OCR 的区别以及通过字符分割验证字符存在性与完整性的核心应用
全球机器视觉市场分析2025-2030
