- @ANSILIC
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在各类电子系统设计中,电平转换器件的选型和电路设计看似是一个相对基础的工作——很多人认为"不就是电平转换吗,看数据手册选个参数对的就行了"。然而,当应用场景涉及到商业航天、核工业控制和特种机器人等极端环境时,选型和设计中的任何一个细节疏忽都可能导致系统在关键任务中的失效。为核心,从工程师实战的角度出发,系统性地讲解从需求分析、芯片选型、原理图设计、PCB布局布线到调试验证的全流程方法和注意事项,并
在各类电子系统设计中,电平转换器件的选型和电路设计看似是一个相对基础的工作——很多人认为"不就是电平转换吗,看数据手册选个参数对的就行了"。然而,当应用场景涉及到商业航天、核工业控制和特种机器人等极端环境时,选型和设计中的任何一个细节疏忽都可能导致系统在关键任务中的失效。为核心,从工程师实战的角度出发,系统性地讲解从需求分析、芯片选型、原理图设计、PCB布局布线到调试验证的全流程方法和注意事项,并
在轨服务与维护技术是延长航天器寿命、降低空间碎片风险及实现空间资源利用的关键手段。本文围绕国科安芯ASM1042S2S商业航天级CANFD收发器,从空间在轨服务任务环境特征、服务机器人通信链路架构需求、器件抗辐射与机电性能指标以及控制系统可靠性设计等方面进行系统分析,探讨该器件在空间在轨服务应用中的技术适配性与工程实现要点。

此外,Infineon(英飞凌)的 AURIX 系列芯片也采用了类似的双核锁步技术,并结合了先进的制造工艺,进一步降低了软错误的发生概率。双核锁步技术作为一种有效的容错手段,能够显著提高汽车芯片在复杂工况下的抗干扰能力和安全性,尤其在应对软错误方面具有独特的优势。通过对比国内外多家厂商的芯片技术,分析了软错误设计在车身域控制器中的关键作用,为汽车芯片的国产化替代提供参考依据。该芯片的设计能够有效检
本文深入剖析了芯片软错误概率问题,结合 AEC-Q100 与 IEC61508 标准,以 130 纳米工艺 1Mbit RAM 芯片为例阐述其软错误概率,探讨汽车芯片安全等级划分及软错误对汽车关键系统的影响,分析先进工艺下软错误变化趋势,并提出相应的应对策略,旨在为芯片在汽车等安全关键领域的应用提供理论参考与实践指导,保障电子系统可靠性。

国科安芯:其推出的AS32A601芯片,基于自研E7内核,支持32位RISC-V指令集,工作频率高达180MHz,具备512KiB内部SRAM、512KiBD-Flash和2MiBP-Flash,集成多种外设接口(如6路SPI、4路CAN、4路USART等),满足汽车车身控制系统、电机驱动系统等应用场景需求,已通过AEC-Q100Grade1认证,达到汽车级可靠性标准。通过先进封装技术,实现芯片与

其计算方式为:输入电压变化过程中输出电压的最大值减去最小值,再除以标称输出电压并乘以百分比,ASP4644具有良好的线性调整率,可达到0.01%。测试方法是利用电子负载的动态功能,使其在设定的两个电流值之间周期性切换,切换的频率和占空比按照测试条件设置,电流变化的上升沿速率固定为 1A/µs。效率和负载调整率的测试在不同负载条件下进行,记录输入和输出的功率,并计算对应的指标。其计算方式为:无负载电

商业航天领域的发展对电子系统的可靠性和抗辐照能力提出了更高要求。本文深入探讨了抗辐照加固CANFD芯片如何借助车规级设计,增强商业航天系统的可靠性。本文以国科安芯CANFD芯片ASM1042为例,通过对芯片单粒子效应脉冲激光试验报告、数据手册及芯片测试报告的分析,阐述车规级设计在提升芯片抗辐照性能、功能安全性和环境适应性等方面的关键作用,为商业航天电子设备的国产化和高性能发展提供了理论依据和技术支
摘要:在当前科技快速发展的背景下,众多领域的通信系统面临着复杂环境带来的严峻挑战。本文深入剖析了以国科安芯ASM1042为代表的高性能通信接口芯片,从技术架构、性能指标、测试验证及多领域应用适配性等多个维度展开系统性研究,旨在为复杂环境下的通信接口设计提供理论参考与实践指导,推动相关技术的创新与发展。随着信息技术的飞速发展,通信技术已成为现代社会发展的重要支撑。在工业自动化、汽车电子、医疗设备以及
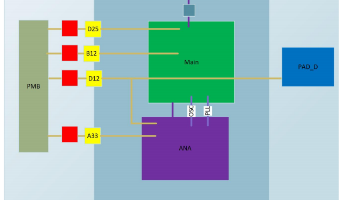
另一方面,它管理所有唤醒源(如特定GPIO 电平变化、看门狗、RTC等),当检测到有效唤醒信号时,触发芯片从低功耗模式快速恢复到正常工作模式,同时保证唤醒时序的准确性。RISC-V 芯片的多时钟源(内部 32KRC、外部晶振、PLL)由 PMU 统一协调,它可根据工作模式切换时钟源(如休眠时切换到低功耗 32K 时钟,正常工作时切换到高频 PLL 时钟),同时关闭未使用的时钟分支,减少时钟树的冗余