
写文章




- @2301_81315771
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
基于改进型CNN神经网络的车牌定位识别系统(Matlab)
本项目设计了一个基于改进VGG卷积神经网络的车牌识别系统,主要包含车牌定位、字符分割和字符识别三个核心模块。系统能够自动识别蓝牌、黄牌和新能源绿牌,通过颜色分割与几何分析定位车牌区域,并结合垂直投影法实现字符分割。针对32×32灰度字符图像,设计了轻量化VGG网络结构,采用Conv-BN-ReLU模块和全局平均池化提升分类性能。

Vivado调用FFT IP核进行数据频谱分析
本文介绍了FPGA音频频谱分析仪中FFT核的配置与测试过程。通过Verilog代码实现了FFT核的实例化,配置了固定参数用于频谱分析。测试中使用15kHz正弦波作为输入信号,产生4096个采样点。仿真结果显示,FFT核正确计算出输入信号频率为15000Hz,验证了IP核配置的正确性。该方法采用模块化测试,有助于快速定位问题,为完整频谱分析仪开发奠定了基础。
项目作品展示——智能停车场管理系统(中国大学生计算机设计大赛省级三等奖作品)
本设计采用ESP8266 D1mini开发板作为核心主控,以LicheeRV Nano(见上一篇博客)开发板作为视觉方案,构造了一个成本极低、识别准确、功能强大的电子停车场自助管理系统。基于esp8266d1mini的低成本制作——电子自助停车场管理系统(项目展示)

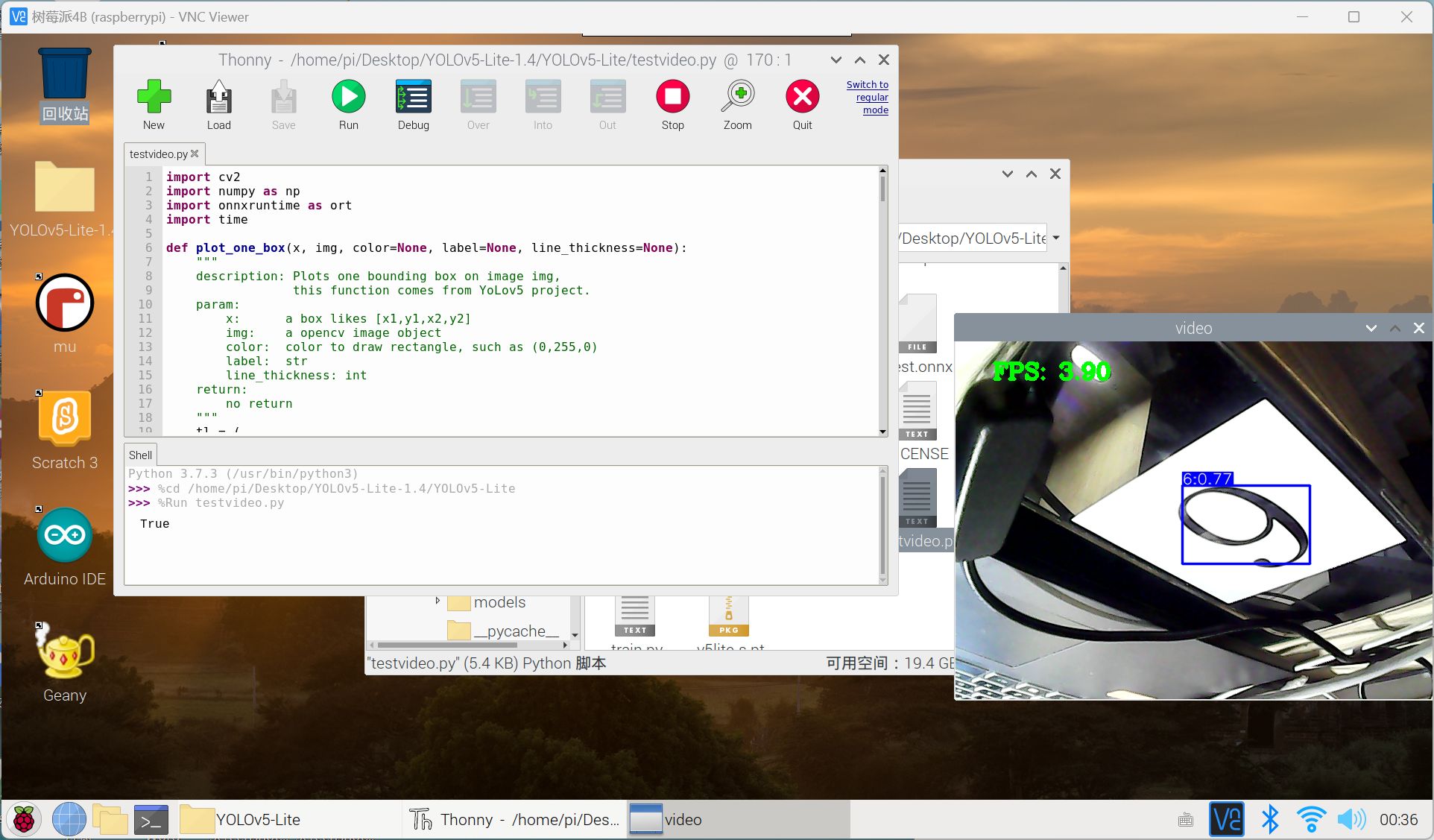
零Python基础快速入门——视觉识别程序/深度学习以及在树莓派上的移植应用(YOLOv5-lite/适用于电赛、例程为简单的数字识别)
摘要:零Python基础快速入门——视觉识别程序/机器学习以及树莓派移植(YOLOv5-lite/适用于电赛,例程为简单的数字识别)过程简单不用理解代码/文章偏向应用方面而非原理的探寻,希望各位大佬不吝指教!
到底了