




- @2301_80343155
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
摘要: 本文针对睿尔曼机械臂夹爪控制例程中“指令成功但夹爪无动作”的问题,通过“软件复查→硬件测量→通信排查”三阶段定位故障根源:官方例程遗漏了末端端口电压初始化(默认0V导致夹爪无供电)和通信协议配置(指令无法识别)。解决方案包括:1)通过示教器或代码配置24V输出电压;2)在示教器设置匹配的波特率等通信参数。最终提出软硬件协同调试方法论,强调工业设备需结合手册补充例程未覆盖的初始化步骤,并推荐
本文介绍了睿尔曼第三代机械臂的Python控制方法,该机械臂通过TCP/IP协议通信,提供简洁的Python API,无需复杂硬件接线即可实现控制。文章详细解析了机械臂控制的核心逻辑,包括环境配置、型号适配、连接建立和运动控制等模块。通过封装RoboticArm类,用户可快速实现关节空间和笛卡尔空间的运动控制,支持多型号机械臂适配。文中提供的代码示例和参数说明为零基础用户提供了清晰的入门指导,使读

手眼标定技术原理与应用 手眼标定是解决机器人视觉系统中相机与机械臂坐标系转换的关键技术,主要分为Eye-in-Hand和Eye-to-Hand两种架构。前者相机安装在机械臂末端,后者相机固定于外部。两种架构都通过构建坐标变换回路,最终归结为求解AX=XB矩阵方程。其中A表示机械臂末端相对运动变换,B表示相机或标定板的相对运动变换,X为待求的坐标系转换矩阵。该方程可分解为旋转矩阵R和平移向量t分别求
本文详细解析了睿尔曼官方提供的手眼标定代码库,包含两种标定模式:眼在手上(Eye-in-Hand)和眼在手外(Eye-to-Hand)。代码库通过采集机械臂位姿和标定板图像,计算相机与机械臂之间的坐标变换矩阵。核心模块包括数据采集、标定计算和辅助工具,其中compute_in_hand.py和compute_to_hand.py分别实现两种模式的标定计算,使用OpenCV的Tsai算法求解变换关系
具身智能正站在“技术爆发+产业落地”的双重拐点,成为人工智能从“数字虚拟”走向“物理现实”的核心载体。从认知科学的理论假说,到多模态大模型驱动的技术突破;从实验室的Demo演示,到工业车间的规模化应用,具身智能用短短几年时间完成了“从0到1”的跨越,2025年的产业化元年标志着其正式进入“从1到N”的快速发展期。
本文详细介绍了机械臂手眼标定的全流程,包括环境配置、设备准备、两种标定场景(眼在手上/眼在手外)的具体操作步骤,以及常见问题解决方案。通过Python脚本实现数据采集与标定计算,最终输出相机与机械臂的坐标转换关系。标定结果可应用于视觉引导抓取,文中还提供了坐标转换的示例代码。整个过程需确保设备稳定、采集姿态多样,以获得1cm内的精度误差。

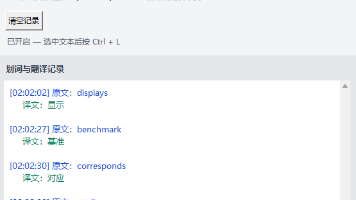
SnapTranslate是一款基于Python开发的轻量级划词翻译工具,解决了传统翻译方式兼容性差、操作繁琐的痛点。只需选中文本后按下Ctrl+L快捷键,即可在鼠标旁弹出半透明悬浮窗显示翻译结果,支持全场景使用且无广告。工具采用Tkinter构建界面,通过Windows API实现全局热键监听,调用Google翻译接口并优化缓存机制,同时运用多线程避免界面卡顿。开源代码支持自定义快捷键、翻译引擎
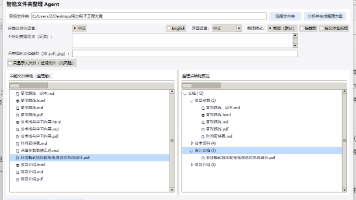
摘要: 「智能文件夹整理Agent」是一款基于DeepSeek大模型驱动的开源工具,可高效解决文件杂乱问题。核心功能包括: 多模式智能分类(智能语义分析、后缀名分类、前缀分组); 可视化交互(拖拽调整、右键自定义目录); 安全防护(标记大文件/近期文件,支持撤销操作); 个性化定制(多语言切换、自定义规则)。 工具采用轻量化Python+Tkinter开发,具备文件系统感知、AI决策、安全执行和反
本文针对第二十届全国大学生智能汽车竞赛智能视觉组任务,从红色立方体定位、15类物品分类和手写数字识别三个关键技术点展开分析。在定位方面比较了垂直/斜向下YOLO检测、水平视觉定位及传感器融合三种方案;分类任务建议通过eIQ训练模型,强调数据集规模的重要性;数字识别提出整体100分类和分数字+角度识别的两种思路,后者虽逻辑复杂但准确率更高。文章指出各方案需结合队伍技术实力选择,并提醒注意数据增强和硬

本文从定义、研究现状、技术分支、产业应用等维度,带您全面读懂视觉大模型的技术内核与发展脉络。
