
写文章




- @zhoubiaodi
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
ORB_SLAM3开发环境搭建(使用docker容器方式)
ORB-SLAM3是一种基于视觉传感器的实时单目、双目和RGB-D SLAM系统。SLAM代表同时定位与地图构建,是指在未知环境下通过机器人上搭载的传感器获取数据并运用算法进行实时处理,从而在机器人运动中同时完成对机器人自身姿态的估计和构建三维环境地图。ORB-SLAM3是由英国伯明翰大学开发的,是ORB-SLAM2的改进版本,加入了语义信息处理,能够更加准确地估计相机的位置和方向,并且可以识别场

脚本:通过ssh、scp和expect批量复制文件到其它设备,已解决传输文件不完整的问题
通过ssh、scp和expect批量复制文件到其它设备,已解决传输文件不完整的问题
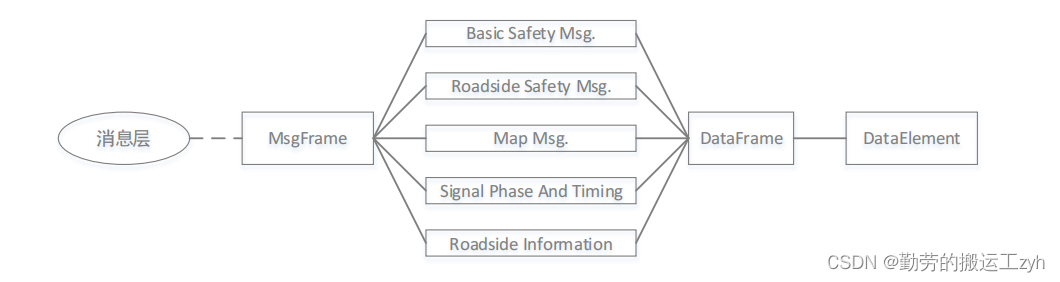
车联网V2X通信开发流程详解(RSI...消息集、asn编解码+所有资料)
针对这个行业标准,对V2X通信的开发流程进行描述,并提供开发所涉及到的全部参考资料:RSI、RSM、BSM...消息集编解码代码示例、V2X-2020.asn、《基于LTE的车联网无线通信技术 消息层技术要求》、《GBT 29100-2012 道路交通信息服务 交通事件分类与编码》、《GB 5768.2-2009 道路交通标志和标线 第2部分:道路交通标志》。
鸿蒙系统设备开发之编译原理 解耦 第三方库交叉编译 详解
在Linux下,我们习惯了使用gcc、g++或其它交叉编译工具链,对C/C++应用程序进行编译。但是,在鸿蒙系统设备开发指导文档中,我们发现编写1个“Hello World”应用程序,是通过编辑BUILD.gn文件,与完整的鸿蒙系统全套代码一起整体编译打包的,整个流程耗时很长,耦合性太高。因此,本文将详细解析鸿蒙应用的编译原理,将应用编译和鸿蒙源码编译解耦,达到Linux下编译的效果,并提供一些第

到底了