




- @z1872385
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
C:\Users\用户名\AppData\Roaming\QtProject把这个文件夹删空。
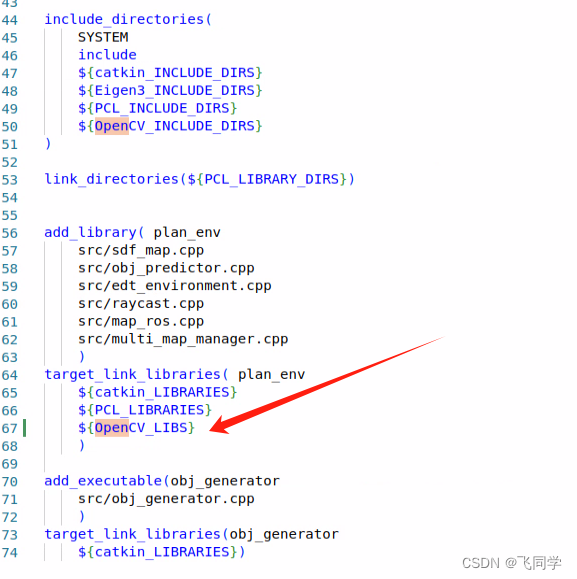
编译时错误如下:/usr/bin/ld: warning: libopencv_imgcodecs.so.3.2, needed by /home/thinkpad/Desktop/ubuntu18-ros/mavros_ws/devel/lib/libapriltag_ros_single_image_detector.so, may conflict with libopencv_imgcod
一、卸载opencv (如果没装那直接跳过这一步)1、查看已安装的 opencv 版本pkg-config --modversion opencv//或pkg-config --modversion opencv42、卸载sudo make uninstallcd..sudo rm -rf build2.清理 /usr 中所有 opencv 相关项//注意这里为了确保删干净重复写了一些路径,建议大
QAndroidJniObject 是对原始JNI类型的封装,属于Androidextras模块,要使用它需要在pro文件中加入。3、通过JNI方式,调用Java的camera例程(系统自带摄像头采集程序)⭐⭐⭐⭐⭐。4、通过JNI方式,在Java中编写形成类库,qt中打包引用 ⭐。打开一段视频或者摄像头。
#1sudo apt-get install qemu-user-static#2sudo apt-get install python#3mkdir 32.4.5&cd 32.4.5#4tar -xf Tegra186_Linux_R32.5.1_aarch64.tbz2#5cd Linux_for_Tegra/rootfs#6sudo tar -xpf ../../ Tegra_Lin

基于YOLO+ARUCO的无人机目标检测及位置计算。
OpenCV4 for CUDA安装OpenCV提供图像处理过程中的基础API,所以首先完成OpenCV4的构建。为了利用Jetson平台拥有CUDA加速的优势需要先安装OpenCV的CUDA版本。(Jetpack默认为非CUDA版本)更新安装包sudo apt updatesudo apt install -y build-essential cmake git libgtk2.0-dev pk

视觉SLAM十四讲:从理论到实践 第一版电子版PDF链接:https://pan.baidu.com/s/1SuuSpavo_fj7xqTYtgHBfw提取码:lr4t源码github链接:https://github.com/gaoxiang12/slambook.git视觉SLAM十四讲:从理论到实践 第二版电子版PDF链接:https://pan.baidu.com/s/1VsrueNrdq
最近在研究如何使用UAV,由于是初学者,不好直接上手实体无人机,因此考虑通过在gazebo中模拟的方式进行一下无人机的简单使用模拟,于是了解到了PX4这个东西,他不仅支持固件写入,更支持gazebo和jmavsim进行模拟,对于无人机初学者来说比较友好,但是在学习过程中本人遇到了非常多的坑,在此记录一下。(一)PX4安装与测试安装:想要安装px4请先参考px4 development guide,