




- @yangSHU21
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
回答这个问题可以从两方面入手,一个方面是它的具体构成(即构成因特网的基本硬件和软件组件;另一个方面是服务描述。协议(protocol)定义了在两个或多个通信实体之间交换的报文的格式和顺序,以及报文发送和/或接收一条报文或其他事件所采取的动作。DNS的一种简单设计是在因特网上只使用一个DNS服务器,该服务器包含所有的映射。单点故障。如果该DNS服务器崩溃,整个因特网随之瘫痪通信容量。单个DNS服务器

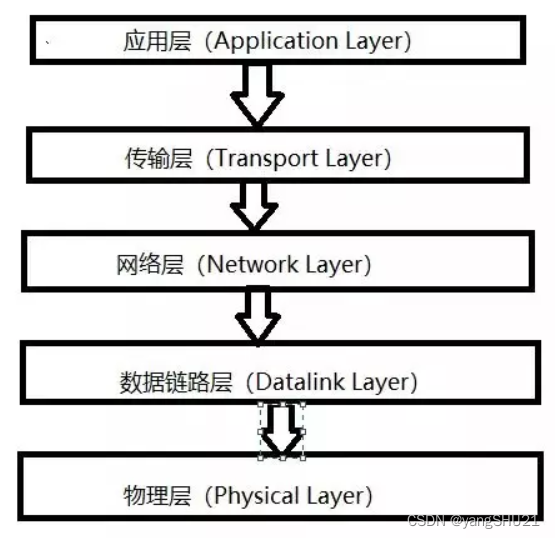
将运行链路层协议的任何设备均称为节点(node)。节点包括主机、路由器、交换机和WiFi接入点。把沿着通信路径连接相邻节点的通信信道称为链路(link)。为了将一个数据报从源主机传输到目的主机,数据报必须通过沿端到端路径上的各段链路传输。
通过前面的学习,我们已经知道转发表(在基于目的地转发的场景中)和流表(在通用转发的场景中)是链接网络层的数据平面和控制平面的首要元素在前面我们已经知道路由控制的两种方法每路由器控制。(图5-1)每台路由器中都包含转发和路由选择功能。每台路由器有一个路由选择组件,用于与其他路由器中的路由选择组件通信,以计算其转发表的值逻辑集中式控制。(图5-2)逻辑集中式控制器计算并分发转发表以供每台路由器使用该控
其实在询问MAC地址的数据包中,在对方的MAC地址这一栏中,填的是一个特殊的MAC地址,其他计算机看到这个特殊的MAC地址之后,就能知道广播想干嘛了。的方式发送的,这时同一子网中的其他计算机也会收到这个数据包,它们会把数据包的MAC地址取出来和自身的MAC地址进行对比,如果两者相同,则接受这个数据包,否则就丢弃。有了子网掩码,相当于我们知道了网络部分是几位,主机部分是几位,我们只需要把IP地址与它
其实在询问MAC地址的数据包中,在对方的MAC地址这一栏中,填的是一个特殊的MAC地址,其他计算机看到这个特殊的MAC地址之后,就能知道广播想干嘛了。的方式发送的,这时同一子网中的其他计算机也会收到这个数据包,它们会把数据包的MAC地址取出来和自身的MAC地址进行对比,如果两者相同,则接受这个数据包,否则就丢弃。有了子网掩码,相当于我们知道了网络部分是几位,主机部分是几位,我们只需要把IP地址与它
ind为矩阵X中满足查找条件的线性索引值。因为在matlab 中,矩阵是按列存储的,ind的值表示元素在矩阵中按列存储时的位置。m和n是列向量,分别保存元素在矩阵中的位置的行下标和列下标。matlab中数据的基本格式是矩阵,行向量、列向量和标量都是矩阵的特例。矩阵可以是二维的,也可以是多维的。对于矩阵中单个元素的删除,MATLAB只允许使用线性索引值来指定该元素。(5)取得矩阵中元素的最大值和最小

在进行图像旋转的过程中,图像以旋转中心为坐标原点,最终完成旋转还需要将坐标原点移动到图像的左上角。旋转后图像的尺寸可以由图像极值点确定,设旋转后图像的最左边点的横坐标为lxmin,最右边的横坐标为lxmax,最高点的纵坐标为lymin,最低点的纵坐标为lymax.而旋转时一般使用的是常见的笛卡尔坐标系,向右为X正方向,向上为Y正方向。第一步先解释坐标系转换的过程。图像旋转后图像的水平对称轴、垂直对

filename 图片路径编译器里面接受 单斜杆/, 双斜杆//, 以及反向双斜杆 \\。IMREAD_COLOR = 1,表示以RGB方式读取原图。
图像的仿射变换是指在空间直角坐标系中将一个二维坐标转换到另外一个二维坐标,仿射变换是一种线性变换,可以表示为线性变换(矩阵相乘)与平移过程。使用opencv进行仿射变换时,会先计算出一个仿射变换矩阵,getRotationMatrix2D函数首先将角度转换为了弧度,然后计算旋转矩阵。通过它计算得到二维旋转的仿射变换矩阵后,就可以通过warpAffine函数对源图像进行仿射变换。结果如下:图2是点仿
因为后两种方法是基于系统时间来计算程序运行的时间的,由于操作系统可能会周期性地调整系统时间,因此这两种方法可能不准确。②toc命令:停止由tic命令启动的定时器,并显示自定时器开启到当前所经历的时间。在使用MATLAB进行计算时,用户有时需要了解程序运行所花费的四件,以此来评价程序的执行效率,从而对代码进行优化。matlab中专用命令 format 用于针对数据的显示形式进行控制,但该命令不影响数