




- @wxc_1998
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
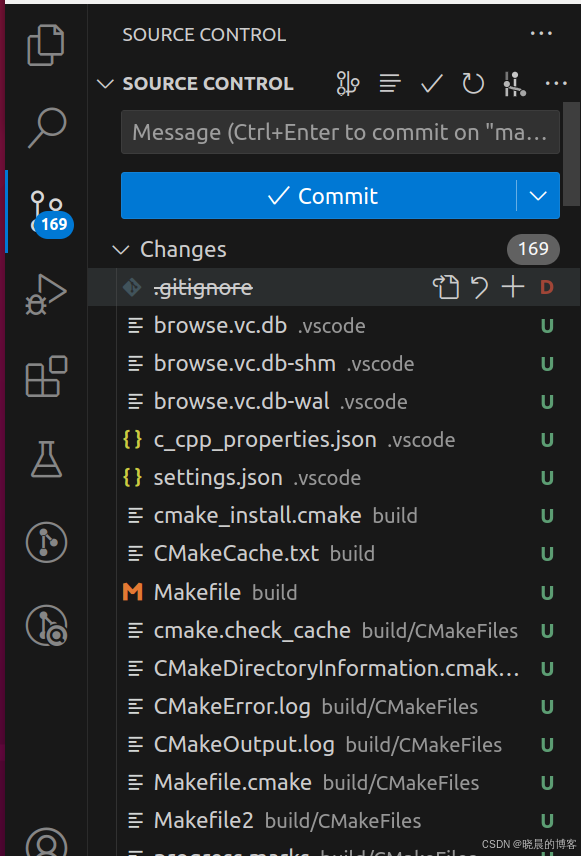
在使用Git管理项目时,通常不需要将根目录下的所有文件夹上传到GitHub,例如编译生成的build文件夹、VSCode生成的.vscode文件夹以及个人数据文件夹data等。为了避免这些文件被Git跟踪并提示未提交的更改,可以在项目根目录下创建一个.gitignore文件,并在其中指定需要忽略的路径或文件。
在 配置了公钥之后我们应该是可以通过SSH方式直接上传或下载github上的仓库的,但是在实际使用过程中由于用了梯子,导致不能使用ssh的方式登录github,还是提示要输入密码git@github.com‘s password: ,没有达到我们想要的效果。如果你能在端口 443 上通过 SSH 连接到 git@ssh.github.com,则可覆盖你的 SSH 设置来强制与 GitHub.com
在实际应用中常常会遇到利用非线性最小二乘进行拟合函数的系数情况。这可以通过MATLAB中内置的函数lsqcurvefit实现,对其进行简单介绍。
Ouster-128激光雷达数据Ouster内部IMU(六轴100Hz)/ Xsens MTi 3(九轴100Hz)/ Xsens MTi-G-700(九轴400Hz)手持平台,正常行走速度,相对于无人车来说晃动较大室内、室外均进行了测试LIO-SAM预积分部分还是比较敏感的,针对无人车平台,行驶速度较慢,平台稳定,晃动幅度小,IMU频率可以设置的较低一些。
相比于模型驱动PDR,数据驱动PDR的鲁棒性更强,尤其能够较好的处理转弯,掉头等航向角迅速变化的动作。逐步增加训练epoch能提高模型在复杂运动中的适应能力增加训练数据量,在平端、摆臂等行走状态下,从指标上来看没有明显的精度提高,从视觉效果上来看更加贴近真实情况;增加训练数据量,在T形多种动作切换状态下获取的轨迹长度更加贴近真值。
目录ROS msg和srv的介绍使用msg创建一个msgmsg和srv的通用步骤ROS msg和srv的介绍msg:msg文件是一个描述ROS消息字段的简单文本文件。它们用于为消息生成不同语言的源代码。srv:一个srv文件描述了一个service。其由两个部分组成,包括一个请求和一个响应。msg文件存储在package包中的msg文件夹,srv文件存储在srv文件夹。msg文件只是一个简单的文本
组内大佬师兄今天抽出时间总结了一篇博客,主要内容是:把“Cartographer 3D 建图”调整为适合自己设备需要修改哪些文件,并进行实验。博客内容全是干货,手把手教学修改URDF文件中的TF树、lua文件参数、以及Launch文件,可以帮助大家少踩很多坑。在这里推荐给大家:基于禾赛32线雷达和Xsens MTi-G-710 组合导航模块,松灵Scout mini 底盘实现 Cartograph
我们在前述的博客中介绍了LIO-SAM的一些准备工作、点云预处理、特征点提取等内容。之后,整理为cloud_info消息类型进行发布,包括其中的面片点、角点两种类型的特征点。接着,本篇博客中将重点介绍IMU预积分的相关处理,与前部分的内容相对独立一些。其发布的IMU里程计数据主要用于后续匹配的初值、点云去除运动畸变(实际未使用)等方面。
Ouster-128激光雷达数据Ouster内部IMU(六轴100Hz)/ Xsens MTi 3(九轴100Hz)/ Xsens MTi-G-700(九轴400Hz)手持平台,正常行走速度,相对于无人车来说晃动较大室内、室外均进行了测试LIO-SAM预积分部分还是比较敏感的,针对无人车平台,行驶速度较慢,平台稳定,晃动幅度小,IMU频率可以设置的较低一些。