- @weixin_68094467
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
大语言模型后训练是在预训练模型的基础上,进一步优化模型性能的过程。预训练模型就像是一个拥有大量语言知识的 “毛坯房”,它通过学习海量文本数据,掌握了基本的语言语法、语义和一些常见的知识。但在实际应用中,还需要根据特定的任务和需求进行 “精装修”,这就是后训练的意义所在。后训练通常会利用特定的数据集和算法,对模型进行微调,使其能够更好地适应诸如回答问题、生成文本、遵循指令等任务。
AI4EDA知识体系全景图展示了从芯片设计到制造的完整AI应用链条。在基础层面,生成式AI正革新PDK开发流程,实现设计规则自动生成和工艺快速迁移;神经网络则优化BSIM模型参数提取,提升仿真精度和效率。这两大技术突破表明AI正从底层重构EDA生态,成为贯穿芯片设计全流程的智能中枢。
大语言模型后训练是在预训练模型的基础上,进一步优化模型性能的过程。预训练模型就像是一个拥有大量语言知识的 “毛坯房”,它通过学习海量文本数据,掌握了基本的语言语法、语义和一些常见的知识。但在实际应用中,还需要根据特定的任务和需求进行 “精装修”,这就是后训练的意义所在。后训练通常会利用特定的数据集和算法,对模型进行微调,使其能够更好地适应诸如回答问题、生成文本、遵循指令等任务。
本文介绍了如何在Ubuntu系统中卸载Gazebo9并安装Gazebo11的步骤,包括添加软件源、安装命令等。详细说明了Gazebo11的界面布局和功能,包含场景视图、左右面板、上下工具栏的操作方法。重点讲解了使用模型编辑器创建简单机器人的过程:从插入基本形状、调整参数、创建连接关节,到最终组装完整的车辆模型。文章还涉及了ROS中Gazebo的基本使用方法,如启动命令、视图操作等,为机器人仿真开发
在多模态的未来预测,几何表示改进了相机图像和激光雷达点云的预测质量。我们的模型由三个阶段组成,从左到右依次为:首先,对原始摄像头图像和激光雷达点云进行处理、编码和融合。其次,我们将传感器数据的。我们认为先前的世界模型主要学习数据中的模式,而不是对真实世界进行建模。我们的无监督学习传感器无关的几何占据表示的方法为模型提供了对物理世界的基本理解。为了使我们的模型具有更深刻的环境理解,我们还学习了一种与
Dlib的核心架构融合了图像计算和深度学习的精髓,凭借高效的算法和灵活的模块化设计,在视觉分析任务中展现出了非常优秀的性能,尤其是在精准识别人脸和面部特征方面。Haar图像特征最初是通过对矩形区域进行分析来开发的,它通过计算不同区域之间的灰度对比,能够捕捉到描述物体形态的关键信息。在人脸识别任务中,Haar特征的一个突出特点就是它能够有效抓取面部的关键结构,比如眼睛、鼻子、嘴巴等位置的亮度差异。具
人脸识别使用阿里SDK支持Python和Java接口,目的是复习巩固智能分类时引入C语言的Python调用此接口是人工智能接口,阿里云识别模型是通过训练后的模型,精准度取决于训练程度,人工智能范畴在常规嵌入式设备负责执行居多,说白的嵌入式设备负责数据采集,然后转发给人工智能识别后,拿到结果进行执行器动作。
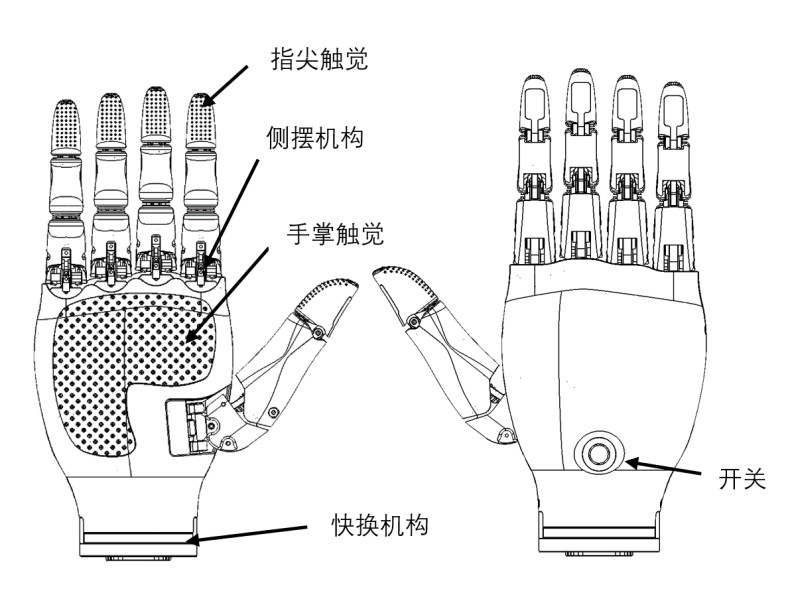
具身智能的概念可以追溯到1950年,图灵在论文《Computing Machinery and Intelligence》中提出机器像人一样能和环境交互感知,自主规划、决策、行动,并具备执行能力,是AI的终极形态。大模型时代,大模型作为机器人的“大脑”,多模态作为机器人的“小脑”,模型的训练和测试与云服务相结合,可以在云上虚拟仿真场景下,进行端到端的实时训练与测试,快速完成端侧迭代与开发,这就大大
GPU已成为AI计算的核心硬件,其选型直接影响AI应用的性能。本文系统分析了NVIDIA GPU架构的演进历程,从Pascal到Blackwell架构的技术创新,重点介绍了Tensor Core、NVLink等关键技术在不同AI场景中的应用。详细对比了RTX 40系列和数据中心级GPU的规格参数,并针对具身智能等特殊场景的需求特点,提出了专业的GPU选型建议。文章为AI开发者提供了从底层架构到实际
图神经网络(GNN)摘要 图神经网络(GNN)是人工智能领域的重要分支,专为处理图结构数据(如社交网络、分子结构、交通网络等)而设计。传统深度学习模型难以应对图数据的不规则性和关系依赖性,而GNN通过节点间的信息传递,实现高效学习。其核心思想包括状态更新和输出函数,利用消息传递范式统一不同模型。GNN在药物研发、蛋白质结构预测、推荐系统等领域广泛应用,展现出强大的跨领域潜力,成为AI研究的热点方向