




- @weixin_53660567
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
D:\programfiles\miniconda\envs\py38torch_gpu\python.exe C:/Users/liqiang/Desktop/LapDepth/train.py --batch_size 8 --dataset KITTI --data_path ./datasets/KITTITraceback (most recent call last):File "C:
作为检测定位分支的重要组成部分,边界框回归损失在目标检测任务中起着重要作用。现有的边界框回归方法通常考虑GT框和预测框之间的几何关系,通过相对位置和框形来计算损失,而忽略边界框的固有属性(如边界框的形状和尺寸)对边界框回归的影响。为了弥补现有研究的不足,本文提出了一种关注边界框自身形状和尺寸的边界框回归方法。首先,分析了边界框的回归特性,并发现边界框自身的形状和尺寸因素将对回归结果产生影响。基于

D:\programfiles\miniconda\envs\py38torch_gpu\python.exe C:/Users/liqiang/Desktop/PyTorch_YOLOv3/train.py --data_config config/coco.data --pretrained_weights weights/darknet53.conv.74Traceback (most re
D:\programfiles\miniconda\envs\py38torch_gpu\python.exe C:/Users/liqiang/Desktop/handpose_x-master/onnx_inference.pyTraceback (most recent call last):File "C:/Users/liqiang/Desktop/handpose_x-master/o
D:\programfiles\miniconda\envs\py38torch_gpu\python.exe C:/Users/liqiang/Desktop/yolov5_pytorch/Yolov5-on-Flask-master/app.pyTraceback (most recent call last):File "C:/Users/liqiang/Desktop/yolov5_pyt
D:\programfiles\miniconda\envs\py38torch_gpu\python.exe C:/Users/liqiang/Desktop/template-matching-ocr/ocr_template_match.pyTraceback (most recent call last):File "C:/Users/liqiang/Desktop/template-ma
orb_cv.cpp#include <iostream>#include <opencv2/core/core.hpp>#include <opencv2/features2d/features2d.hpp>//特征点头文件,处理特征点信息#include <opencv2/highgui/highgui.hpp>//opencv gui头文件#i

💡 🎈🎄🎋🎍🎉🎑🎫🎞🎪🎁🎎🧵🛒🧶🥽🏅🥉🥇🥇🏅🏆🏆🥉损失函数shape_iou本文使用的YOLOv5版本为v7.0,YOLOv8、YOLOv9均为最新版本。默认的损失函数为CIOU。shape_iou论文链接:https://arxiv.org/pdf/2312.17663.pdf
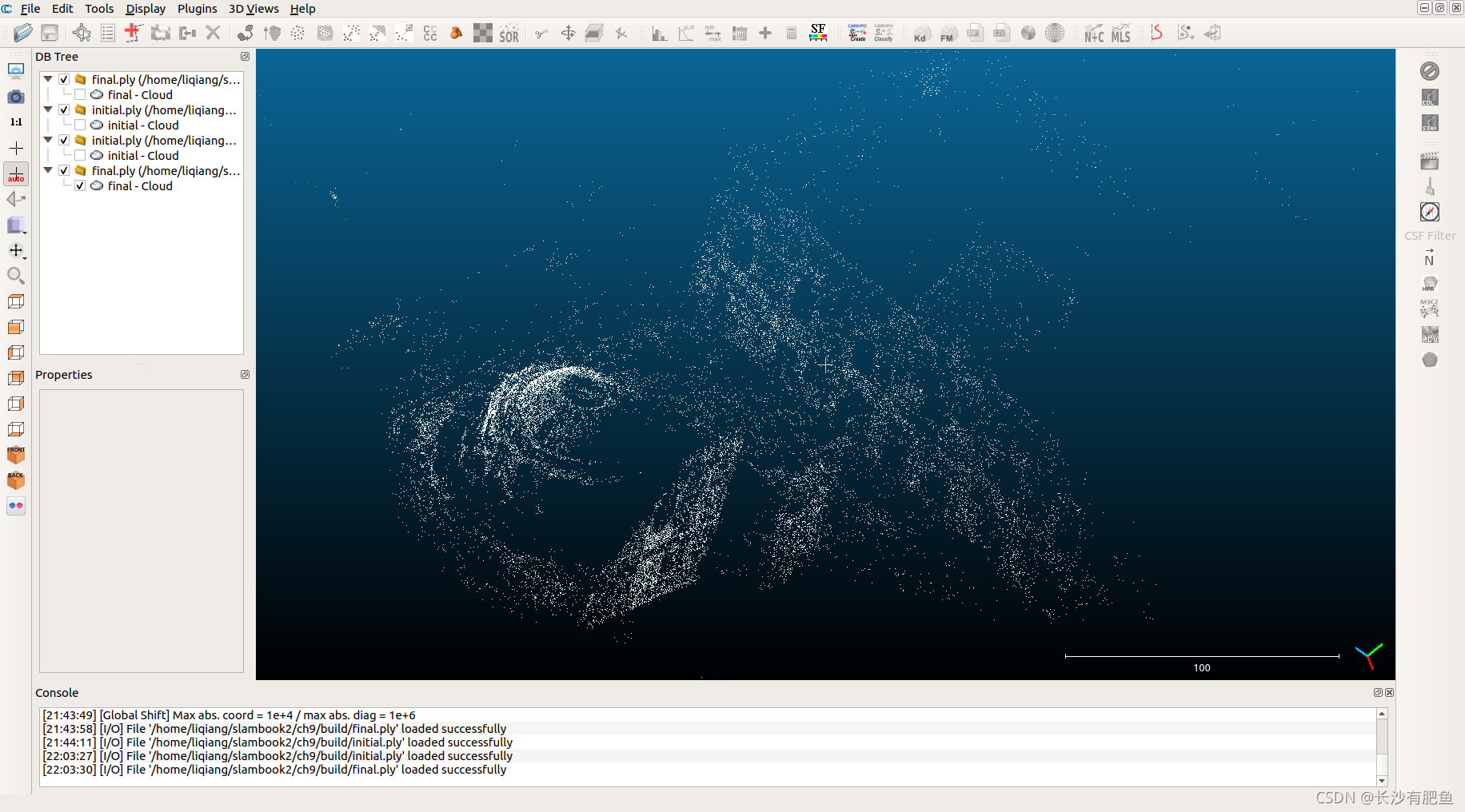
点云查看工具CloudCompare安装:方法1:命令行安装:sudo snap install cloudcompare安装完成后,可以将 ccViewer和CloudCompare添加到任务栏里,也可以使用下面的命令行打开:打开ccViewer:cloudcompare.ccViewer打开CloudCompare:cloudcompare.CloudCompare方法2:在软件中心中进行安装
💡 🎈🎄🎋🎍🎉🎑🎫🎞🎪🎁🎎🧵🛒🧶🥽🏅🥉🥇🥇🏅🏆🏆🥉损失函数inner_iou本文使用的YOLOv5、YOLOv8、YOLOv9版本均为最新版本。论文链接:https://arxiv.org/pdf/2311.02877.pdf