




- @weixin_51772802
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
A:“2>&1” 表示将标准错误(stderr,fd2)重定向到标准输出(stdout,fd1)所在的位置。"> /dev/null 2>&1"是一个比较常见的组合,表示将所有输出(包括正常输出和错误信息)都丢弃。:串口在嵌入式系统中同时充当"内核日志输出口"和"用户交互终端",这种"一个通道两个角色"的设计会带来什么问题?今天,我们将从最基础的TTY概念出发,彻底搞懂终端背后的工作原理,让你的终
在嵌入式开发和系统运维的日常工作中,终端(Terminal)看似简单,实则蕴含着Linux系统最核心的交互机制。从串口调试到SSH远程连接,从环境变量到Shell初始化,每一个"奇怪"的现象背后,都有其深刻的技术原理。在过去的五期博客中,我们从TTY基础出发,逐步深入到串口通道的双重角色、伪终端(PTY)的原理、Shell初始化机制,最终在实战案例中融会贯通。每一篇都致力于将看似零散的知识点,编织

本文深入剖析Linux Shell初始化机制,直击嵌入式开发中“环境变量凭空消失”的痛点。通过对比SSH与串口登录差异,揭示Login Shell中“减号”的关键作用,详解/etc/profile加载逻辑及rcS export失效的根本原因。文章涵盖Shebang陷阱、execve传参误区及Wrapper脚本优雅解法,并新增PS1提示符调试技巧。提供大量可复现的实验命令与排查思路,助开发者彻底掌握

预计目标:用户点击登录后,判断该用户【未提交数据/已经提交数据/有多条数据(这种情况应该是不被允许的!)】,在填充完数据后,点击“提交”按钮,完成数据库的增改。若该用户在数据库中已有数据,则应自动将数据库中保存信息更新至小程序端
朋友们,不知道你们有没有同感。自从有了ChatGPT、Copilot这些“赛博外挂”,我的编码效率那是坐着火箭往上蹿。以前要翻半天手册的sed命令,现在只要对AI说一句:“诶,帮我把文件里所有的foo换成bar,要原地替换。” 它秒回,还附赠三种不同写法,贴心程度堪比老母亲。我曾经也以为,把一切重复性劳动外包给AI,是程序员进化的终极形态。直到那天,我被一个路径问题干趴下了整整一个小时。事情是这样
朋友们,不知道你们有没有同感。自从有了ChatGPT、Copilot这些“赛博外挂”,我的编码效率那是坐着火箭往上蹿。以前要翻半天手册的sed命令,现在只要对AI说一句:“诶,帮我把文件里所有的foo换成bar,要原地替换。” 它秒回,还附赠三种不同写法,贴心程度堪比老母亲。我曾经也以为,把一切重复性劳动外包给AI,是程序员进化的终极形态。直到那天,我被一个路径问题干趴下了整整一个小时。事情是这样
解决了Solidworks中urdf的导出,urdf中continuous和revolute的区别,stl转obj等问题
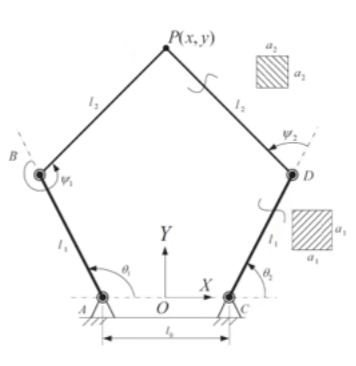
拉格朗日动力学方程和简单(一维输入)系统设置初值求解变量值的Matlab代码实现
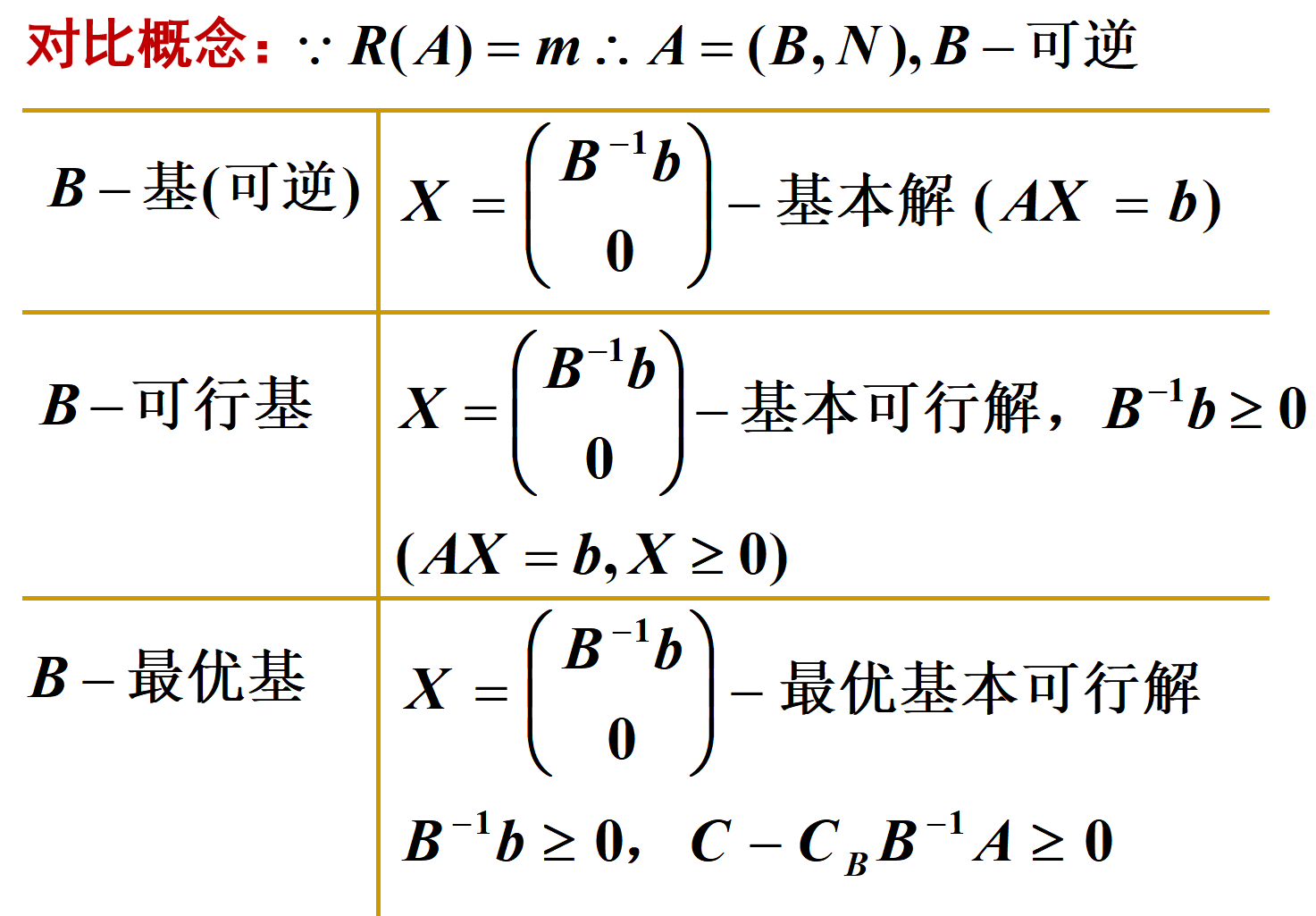
minSCXs. t.AXbX⩾0minSCXs. t.AXbX⩾0可用这一向量形式表示的问题定义见上方注意这里的等效。
本篇的目标是借助官方给的智能车模型,和地图实现小车巡线的仿真