




- @weixin_51554164
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
领域的测量软件长期依赖Windows平台,双翌光电完成适配认证之后,为半导体检测、3C电子制造、科研院所等关键领域提供了一套安全合规的智能测量解决方案。在“国产CPU+国产操作系统+国产工业软件”一体化发展的大趋势下,适配只是第一步,后续还需要持续优化软件在国产平台上的性能表现。第二,拿到麒麟认证之后,双翌光电的软件可以被更广泛地部署到使用银河麒麟操作系统的政企机构和制造企业中。软件的每一个功能模

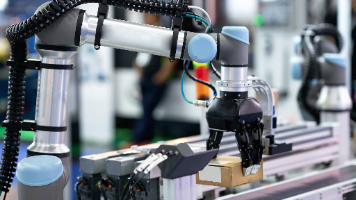
双翌系统能够快速适应不同光照条件、复杂背景以及多样化的工件特征,确保即使在高速运转的生产线上,也能持续提供可靠的目标定位信息,引导机械手完成稳定、精准、高效的抓取任务。视觉系统利用精确的标定参数(事先确定好的相机与机器人基座的相对位置关系),将目标点在相机坐标系下的位置,实时“翻译”成机器人能理解的、在它自己坐标系下的精确位置。无论是汽车制造中精准装配细小的电子元件,还是物流仓库里高速分拣形状各异
图像采集卡是图像采集部分和处理部分的接口。硬件上可理解为相机与计算机之间的接口,图像经过采样量化以后转换为数字图像并输入,储存到帧存储存器的过程,叫做采集,数字化。机器视觉技术是一门交叉学科,主要用来模拟人的视觉功能,用于实际检测、测量和控制。一个典型的机器视觉系统也是由照明,镜头、高速相机、图像采集卡、视觉处理器五大部分组成。

一些深度学习视觉智能检测系统,如双翌光电研发的AI深度学习算法,在处理小而轻微的缺陷、瑕疵方面表现出色,即使是对比度比较低的图像中的缺陷也能检测出来。在工业视觉检测中,传统的自动光学检测主要依赖预先设定的规则和阈值,如亮度、对比度、尺寸等参数。基于深度学习的机器视觉检测系统,正以其强大的特征学习能力、卓越的检测精度和持续进化的智能特性,重塑现代制造业的质量控制体系。随着小样本学习、在线自学习、多模
正是在这样的背景下,机器视觉技术犹如一颗璀璨的新星,在半导体检测领域迅速崛起,以其超凡的精度与效率,引领着半导体产业迈向智能化、自动化的新纪元。同时,结合机器人技术与自动化生产线,实现检测与生产的无缝对接,提高整体生产效率与灵活性。在未来,随着技术的不断进步与应用领域的不断拓展,机器视觉技术将在半导体检测中发挥更加重要的作用,为半导体产业的持续繁荣与发展注入新的活力与动力。值得注意的是,随着国产机
它解决的不仅是单一工艺点的精度问题,更是为整个电子制造业在面对产品快速迭代、设计日趋复杂和劳动力成本上升的宏观挑战时,提供了一种可靠、柔性且可持续的自动化升级路径。在执行端,更预留了与市场主流的谱格、深思微、艾而特等品牌智能电批的专用通讯接口,能够直接读取电批的实时扭矩、角度数据,实现真正的力位混合控制。是一套深度融合了视觉感知、运动控制与工艺逻辑的一体化软硬件解决方案,其设计核心在于化繁为简,将

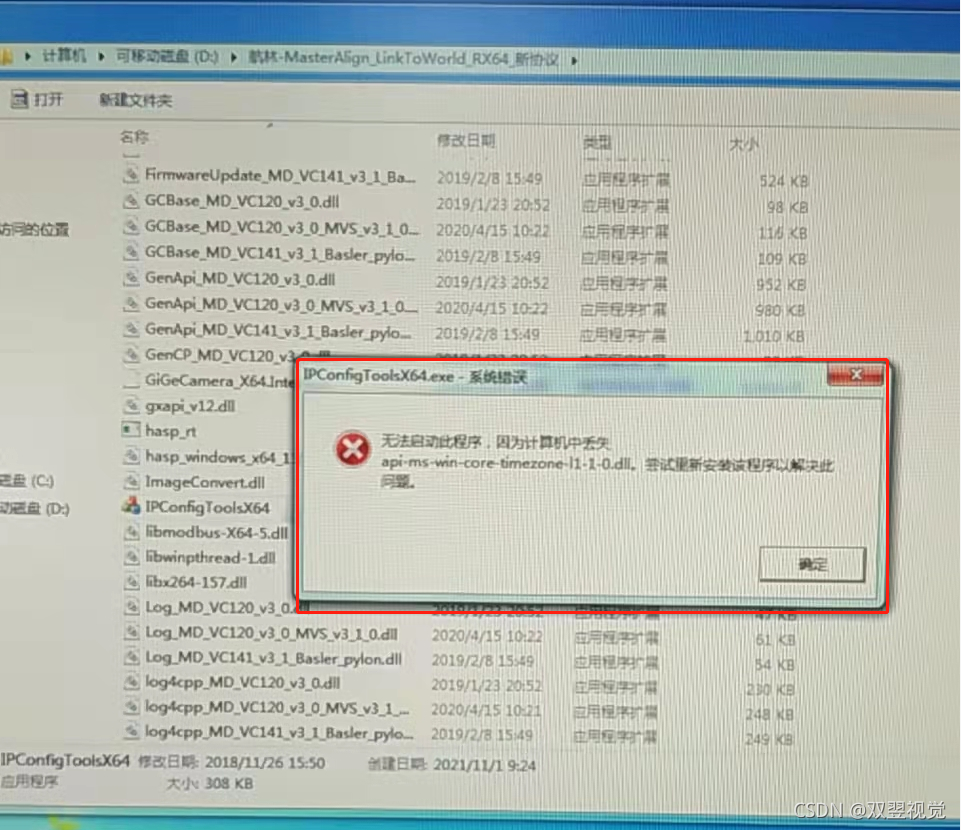
在新工控机或新装的系统中安装好软件环境包后打开软件还提示计算机丢失api-ms-win-core-timezone-l1-1-0.dll文件错误(如下图所示),可以尝试下面三种解决方法。方法一、更换api-ms-win-crt-runtime-|1-1-0.dll文件1.下载api-ms-win-crt-runtime-|1-1-0.dll文件链接: https://pan.baidu.com/s
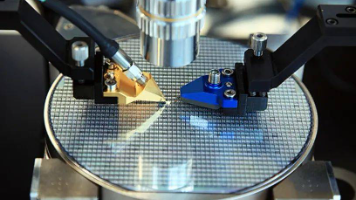
为了达到这个标准,光刻机内部有一套复杂的对准系统,粗对准使用晶圆上两个相距较远的对准标记实现初步匹配,精细对准则需要测量至少20个标记,经过图像处理和算法计算,将定位精度提升至亚纳米级别。双翌光电开发的亚微米晶圆曝光对准应用软件,融合了亚像素定位、高斯拟合、相位匹配等先进算法,能将图像识别精度推进至0.3微米(即300纳米),在半导体制造中确保每一层电路图案与前一层完美对齐,在先进封装中支撑晶圆堆

为了达到这个标准,光刻机内部有一套复杂的对准系统,粗对准使用晶圆上两个相距较远的对准标记实现初步匹配,精细对准则需要测量至少20个标记,经过图像处理和算法计算,将定位精度提升至亚纳米级别。双翌光电开发的亚微米晶圆曝光对准应用软件,融合了亚像素定位、高斯拟合、相位匹配等先进算法,能将图像识别精度推进至0.3微米(即300纳米),在半导体制造中确保每一层电路图案与前一层完美对齐,在先进封装中支撑晶圆堆
这就意味着,你的模型面临的是高度不平衡的训练环境,几百张甚至几十张缺陷样本对垒海量良品样本。这就是缺陷的长尾分布,头部常见缺陷有少量样本,尾部罕见缺陷样本几乎为零,模型对尾部缺陷的检测精度惨不忍睹。采用教师+学生模型架构的半监督学习框架,仅用少量标注数据训练教师模型,生成伪标签指导学生模型训练,在保持98%准确率的同时,将标注需求降低了70%。既然没有足够的坏样本让AI学,那能不能反过来,只给AI
