
写文章




- @weixin_46024116
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
速度观测器解决传感器噪声和延迟:luenberger观测器拯救低成本国产磁编码器
本文探讨了在电机控制(FOC)中如何解决国产编码器噪声与相位滞后的矛盾问题。传统低通滤波方法会引入延迟,影响系统动态性能。文章分析了两种失败方案:逆向滤波器会放大高频噪声,纯数学模型则存在积分漂移。龙伯格观测器通过融合物理模型前馈(高频响应)和传感器误差修正(低频防漂移),实现了零滞后跟踪。文中详细推导了观测器数学模型,给出了C语言实现代码,并指出加入前馈后可大幅降低带宽要求,同时保持良好动态性能
深度解析 VESC 参数辨识源码:电阻、电感与磁链
本文深入解析了VESC开源项目中电机参数辨识的核心算法。重点阐述了电阻、电感和磁链三个关键参数的测量原理与方法:通过直流注入法测量电阻,采用叠加脉冲法避开死区效应测量电感,创新性地利用反电动势面积积分法精确测量磁链。文章特别强调了硬件电路设计对测量精度的影响,并揭示了VESC通过数学换元积分消除转速衰减干扰的巧妙思路。这些方法解决了传统FOC控制中参数测量不准确的痛点,为电机控制提供了可靠的参数基

线性霍尔实现离轴式绝对位置反馈
具体过程就是通过开环强拖或者其他方式使磁环旋转一周,对于每个期望的校准角度,将磁铁旋转到该角度,并记录每个传感器的测量电压(类似于MITcheetah的线性化校准),然后,在正常操作期间,每个传感器的测量电压落在先前记录的两个电压之间,称为Vsbover和Vsbower。理论上通过峰值校准后求出反正切就能得到角度,但是理论归理论,实际上直接通过两个间隔90°的线性霍尔传感器求反正切得到的角度误差t
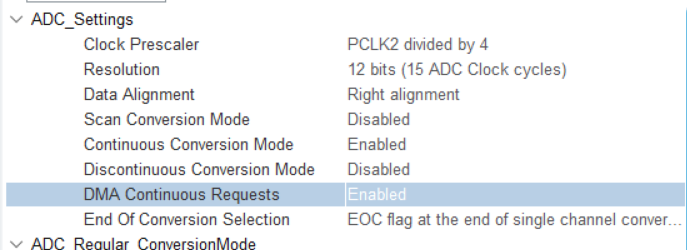
STM32HAL库 ADC DMA数据只更新一次
STM32HAL库 ADC DMA数据不更新读不到
没有用于调试json的拓展下载了拓展也不管用
#没有用于调试json的拓展下载了拓展也不管用
到底了