




- @weixin_45860565
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
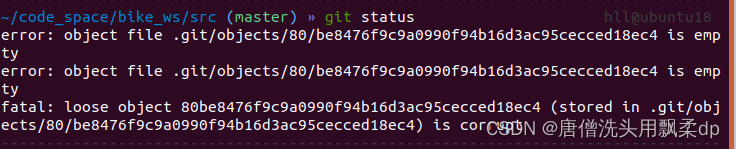
解决 git fatal: loose object 。网上也找了很多解决办法,但是都不够优雅,由于我本地还存有未上传的代码,因此需要保留,这种错误其实只是 .git 文件夹出了问题,此时再次 git clone 一下之前的仓库,然后把里面的 .git 文件夹复制过来就行了,本地的代码正常保存,也不会出现命令错误导致本地工作丢失的情况。最近在使用 git 的时候莫名其妙出现如下的错误显示,可能是在
解决编译ORBSLAM2时的 undefined reference to symbol '_ZN5boost6system15system_categoryEv
在单目 SLAM 中,特征点的三角化
相机标定(Camera calibration)原理、步骤简介在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定(或摄像机标定)。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标
相机标定(Camera calibration)原理、步骤简介在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定(或摄像机标定)。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标
qt.qpa.screen: QXcbConnection: Could not connect to display(vnpy,云主机,图形界面)