- @weixin_44368569
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
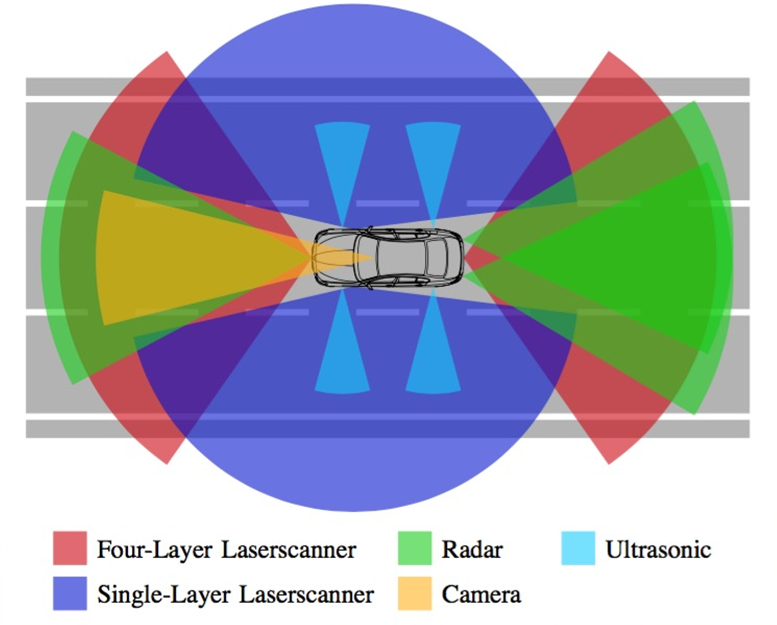
是对自动驾驶之心多传感器标定课程内容的记录,也是对一些被老师简单略过问题的自主学习。第一章是概述,将内容以问题的形式记录,并结合课上内容以及自己的项目经验给出回答。
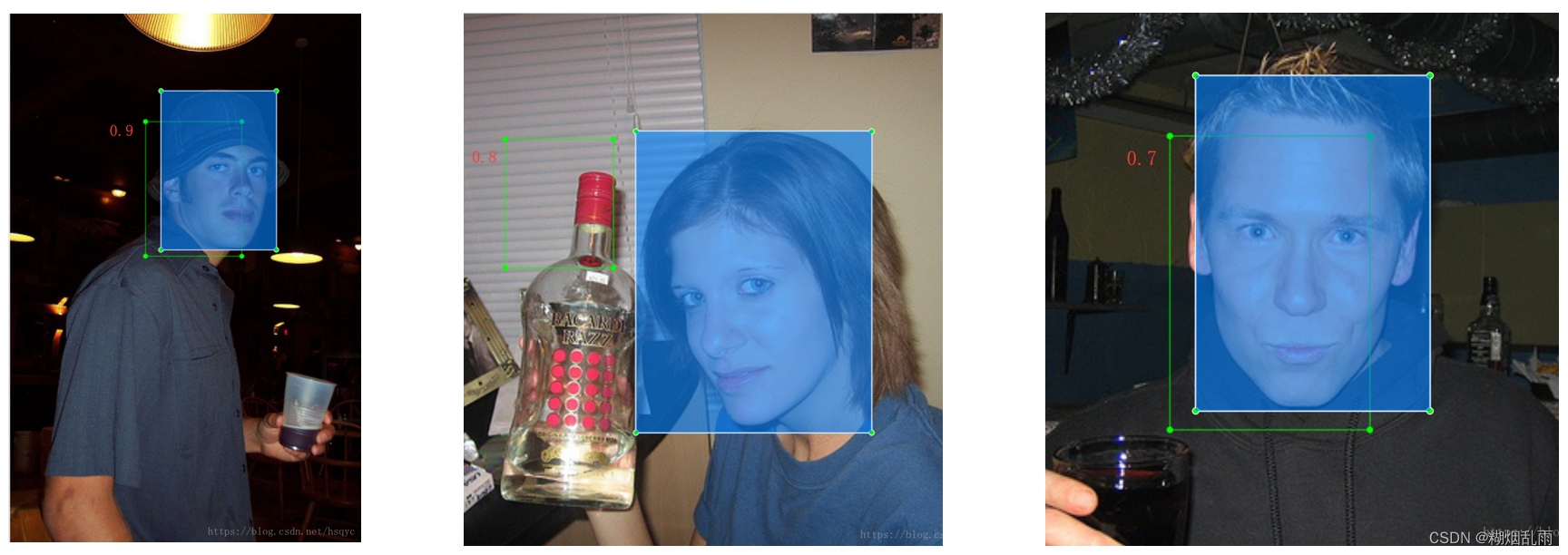
理解目标检测当中的mAP详解object detection中的mAP。虽然前人之述备矣,但我还是要做这篇笔记,按自己的思路讲解学到的东西,希望更能加深理解。
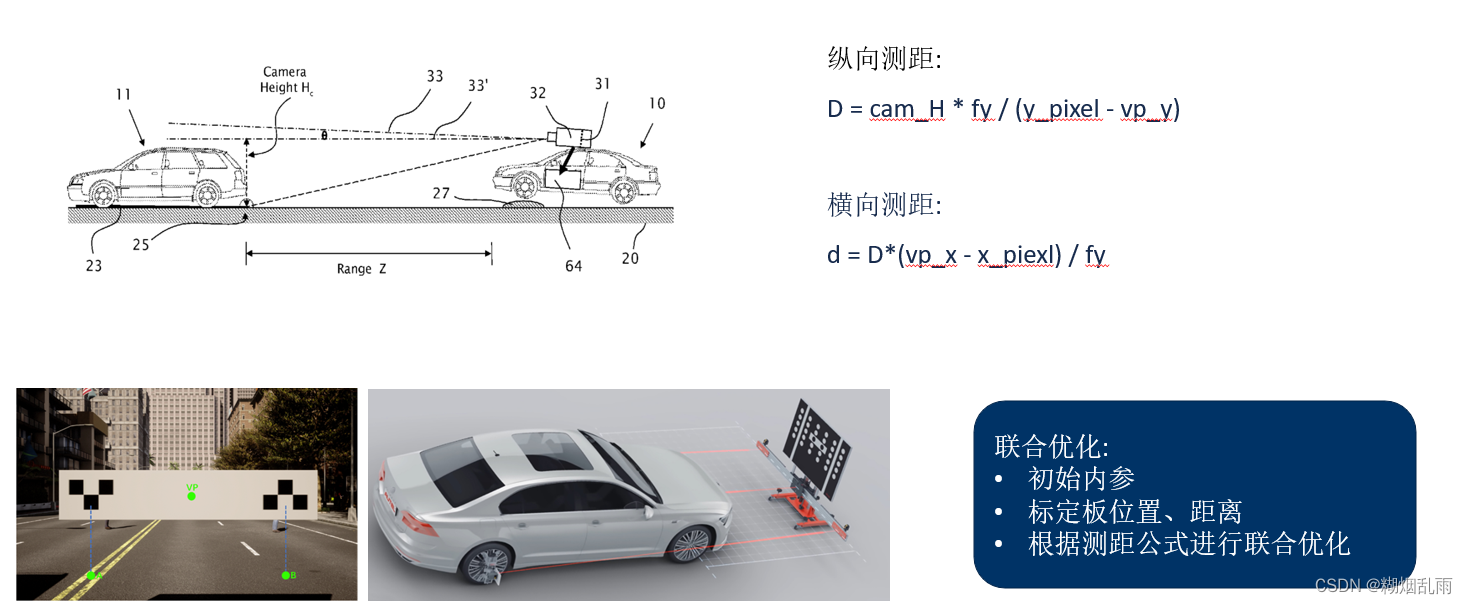
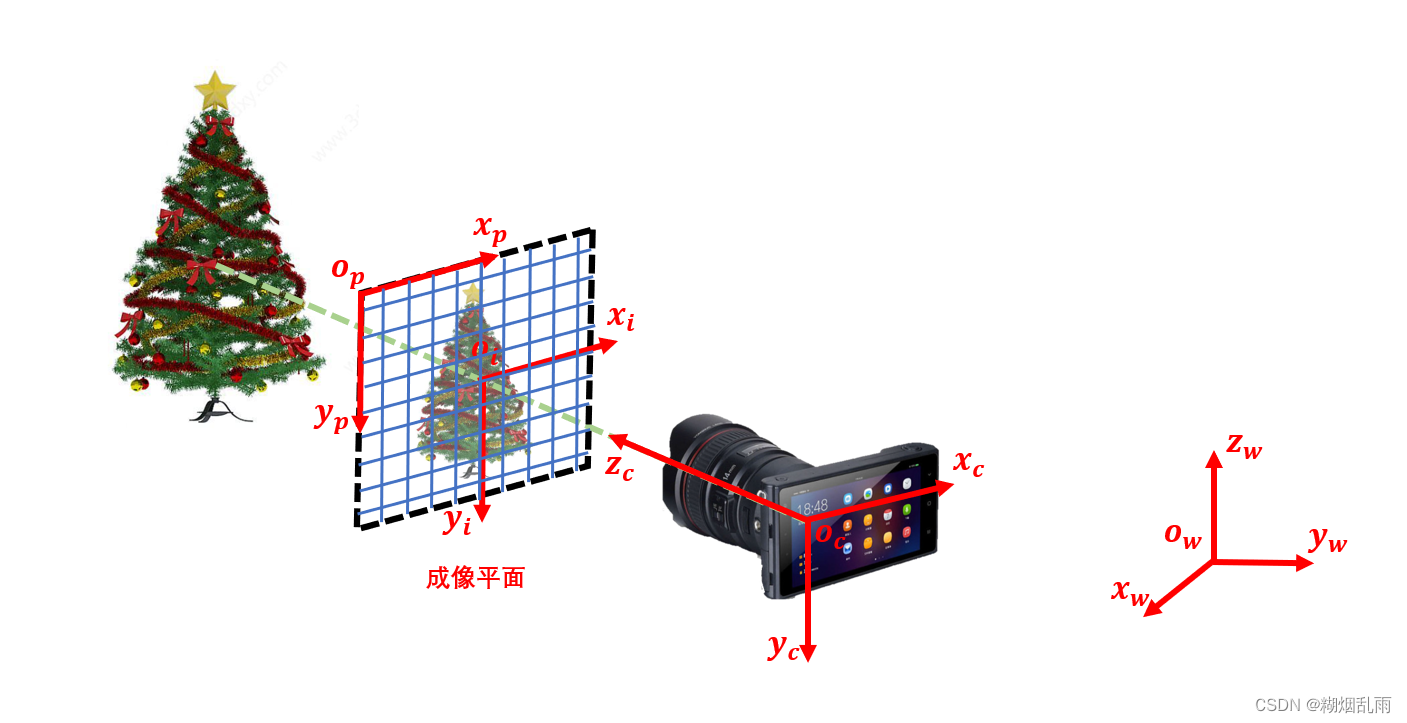
之前写过一篇文章(相机内参、外参、畸变系数简介),感觉应该把这几个东西说的还算明白,但是里边并没有深究该如何进行标定,正好在这次学习中进行补充。我面试时的体验就是,如果你没有那种一眼吊的科研成果,那么项目中再大的创新也就那么样,不如把时间花在了解项目细节上,比如内参标定到底是怎么实现的,而不是面试官问起你这个问题,你只能跟我一样傻笑道我调了opencv的库。。。。。。接着面试官又问,函数的每个输入
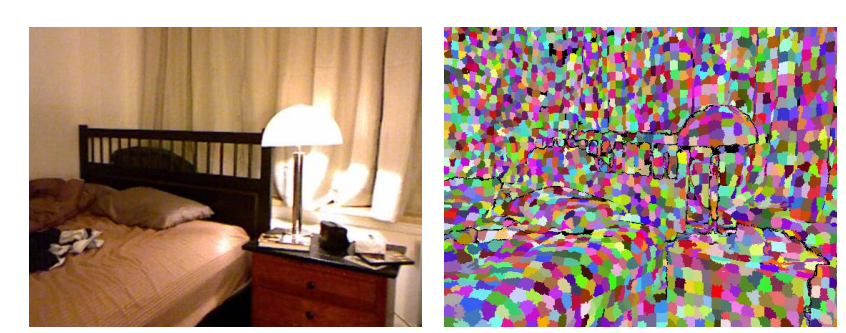
我之前狭隘地以为只有点云深度学习才能处理分割问题,偶然发现传统方法的分割结果一样可以令我眼前一亮。VCCS原文LCCP原文CPC原文其中VCCS是分割前的准备工作,LCCP和CPC是分割的方法,二者论文中的效果图如下,有点出乎我的意料。。。。传统方法我认为最好的点在于通用性很强,并且可解释,应用起来比较友好。这三篇论文出自同一实验室,并且算法实现均已发布到PCL中,所以我准备学习这三篇论文的方法,
这是点云滤波系列的第三篇学习笔记,在之前我们学习了非常经典的MLS算法(点云滤波(一)——MLS(移动最小二乘)/PSS介绍),以及为解决MLS不具备保持边缘问题所提出的变体RMLS(点云滤波(二)——RMLS(鲁棒移动最小二乘)介绍)。RMLS由于没有找到相关的开源代码,并且我对方法也存在一些疑惑,害怕复现出来依托答辩,所以就没有花时间去复现。但是寻找能够保持边缘的边缘的点云平滑算法依然是我目前
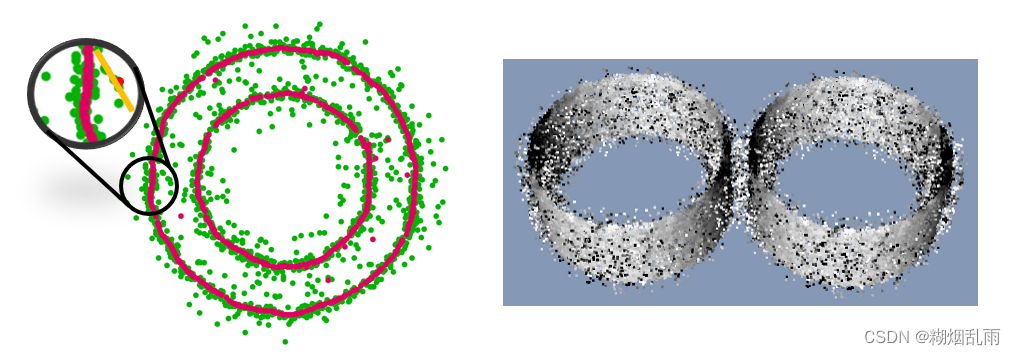
在点云滤波(一)——MLS(移动最小二乘)/PSS介绍,我们讨论了MLS的基本原理,并给出了一个很直观的理解方式。虽然MLS可以显著的减少噪声,但我们也发现了其问题,即会将锐利边缘平滑掉。下图展示了我使用MLS在实际采集到数据上的处理结果,其中白色的点云是原始点云,红色的点云是经过MLS滤波之后的点云。其原因在于MLS假设整个邻域处处光滑,只拟合了一个表面来表征邻域。但对于锐利边缘,这显然不合理。
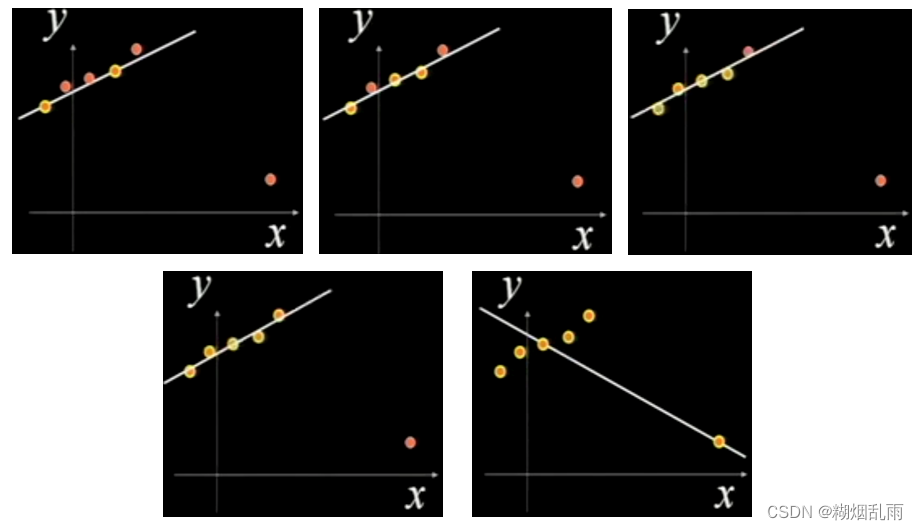
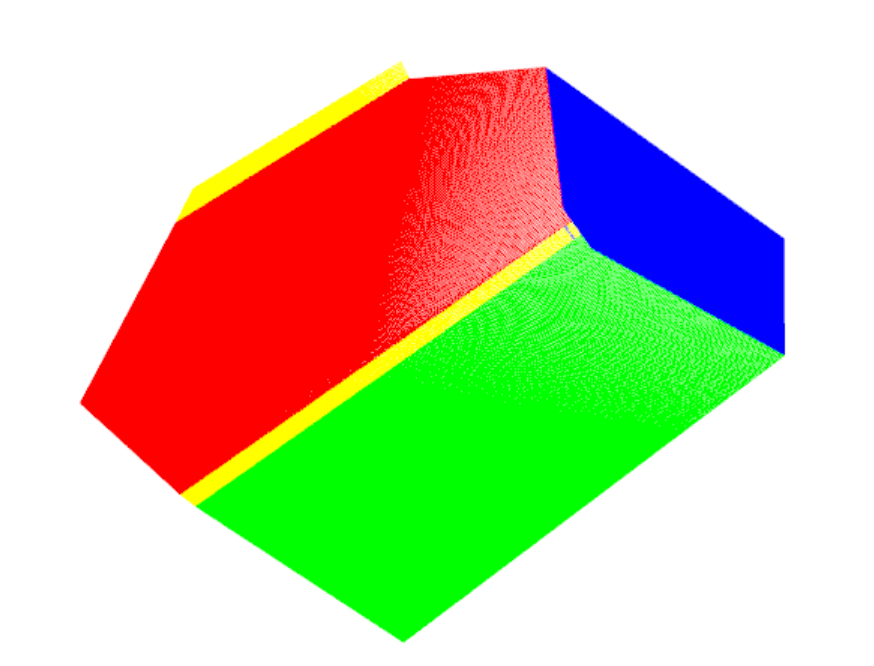
我猜测效果不好的原因如下,RANSAC随机选点其实随机的是点的序号,然后取出对应序号的点。对于有序点云,位于同一平面上的点序号都比较接近,想选出位于同一平面上的点概率相对较低,针对此问题我们可以将代码稍作修改,也就是添加上一节中的注释部分代码。上边使用的测试数据是无序点云,但在测试有序点云的时候,上边代码的效果很差,下边的点云也是类似与上边的三个平面,只不过是从仿真环境种生成的仿真点云。需要注意的
简单介绍了相机内外参和畸变模型的概念,可以快速了解相机
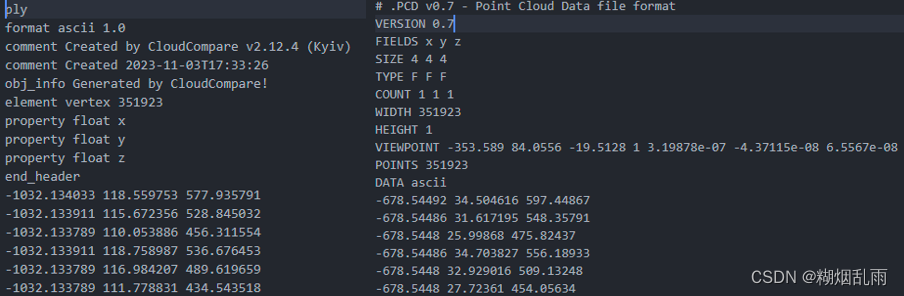
PCD:PCL库的特有格式,专为存储点云数据而设计。PLY:一种多边形文件格式,由 Turk 等人在斯坦福大学开发。STL :3D Systems 创建的立体光刻 CAD 软件原生的文件格式OBJ : 一种几何定义文件格式,最初由 Wavefront Technologies 开发X3D : 用于表示 3D 计算机图形数据的基于 XML 的 ISO 标准文件格式等等这些文件格式因为不同目的再不同时
lib奇奇怪怪的,好像链接引入库或者直接链接动态库都能构建成功,-L后边的路径只是用于构建,而运行的时候还是会从默认路径中去搜索库,而不是从-L后边的路径搜索,要么将用到的.dll放在.exe的同级目录下,要么直接将bin路径设置成系统环境变量。c_cpp_properties.json里设置的include路径,与vscode里对路径的读取有关,这个路径设置出问题,include时候没法补全,并