写文章




- @weixin_44327736
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
机器学习技术栈 ——《跟着迪哥学Python数据分析与机器学习实战》(1)
下采样和过采样实战部分到此结束了,机器学习问题的处理过程,我们的妈妈才是大师。(1) 分析问题,检查数据。(今天想吃什么菜,挑菜选菜)(2) 清洗数据,数据预处理。(洗菜,切菜)(3) 选择建模方法,进行建模。(蒸炸煎煮焖溜熬炖炒,下锅)(4) 调参。(油盐酱醋放多少)(5) 分析建模效果。(今天味道怎么样,吃的好不好,吃的饱不饱)
Linux技术栈 —— 运维基础
首先,既然接触了Linux,就永远不要怕把机器折腾坏,装一个用来测试的Linux虚拟机,就用来玩这些危险命令,或者是你觉得可能把机器搞坏、搞的别扭的命令,不要担心重装系统,多重装几遍到时候你真遇到问题反而是好事,要不怕操作Linux的任何命令,就是干!权限的用户来进行,普通用户在Linux操作系统中没有民主,Linux是典型的中央集权设计操作系统,只有早期的OS才不是中央集权设计,未来如果区块链盛

机器人入门(三)—— ROS环境搭建与ROS Master、Node、Topic、Message
开宗明义,定义先行,辩论赛场里这句话都用烂了,烂归烂,关于概念的定义的认知,会极大的影响到人观察社会的视角,科学事物也一样。下面是关于catkin。(1)catkin是ROS的构建工具,继承自ROS最开始的构建工具rosbuild,此工具由美国的一家公司Willow Garage创建,Willow Garage是一家致力于机器人技术研究和开发的公司,位于美国加州,已于2014年倒闭,catkin的
Ubuntu下安装Python
Ubuntu下安装Python

机器人入门(五)—— 仿真环境中操作TurtleBot
进行实操之前,先准备环境。
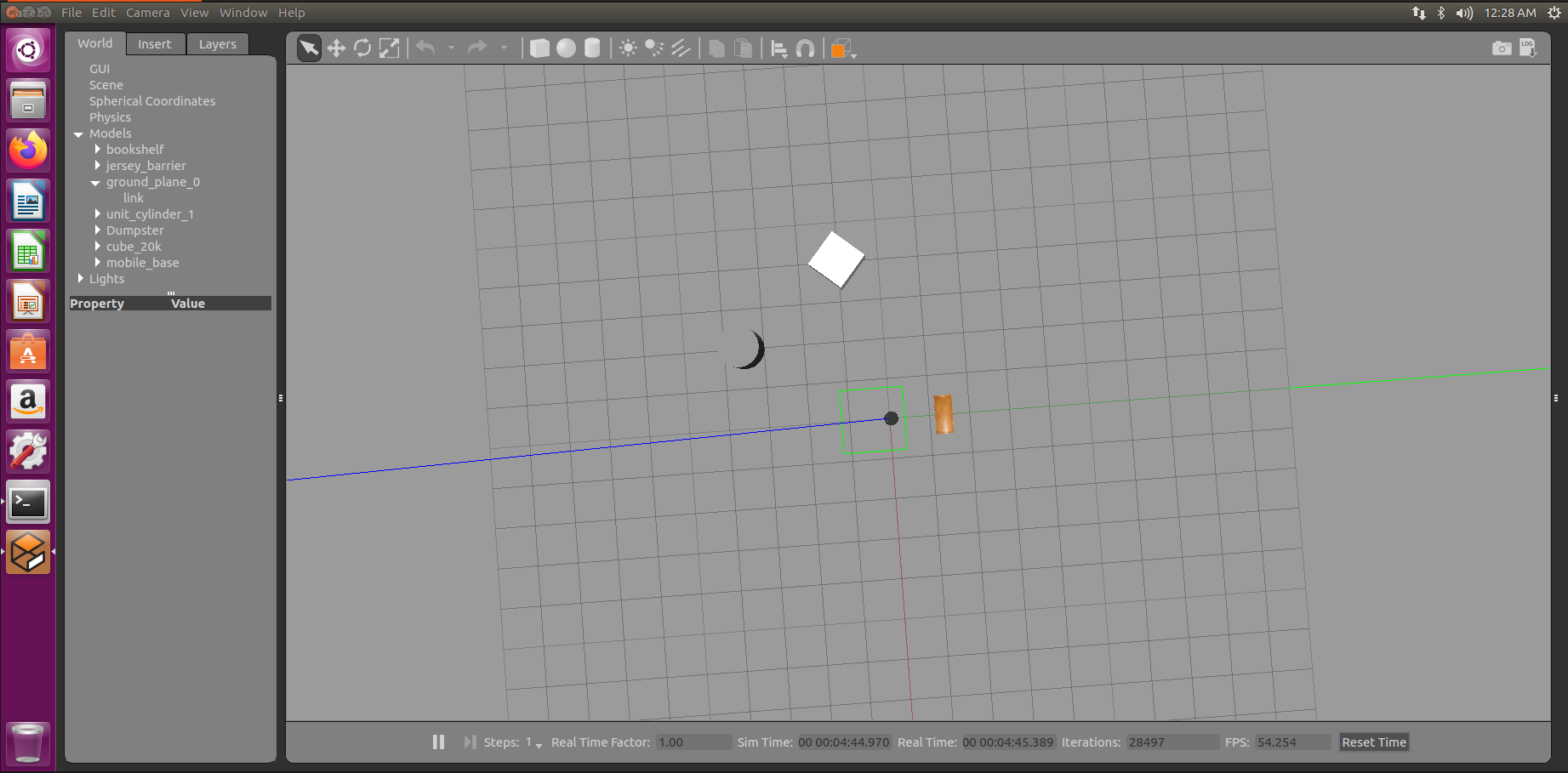
机器人入门(五)—— 仿真环境中操作TurtleBot
进行实操之前,先准备环境。

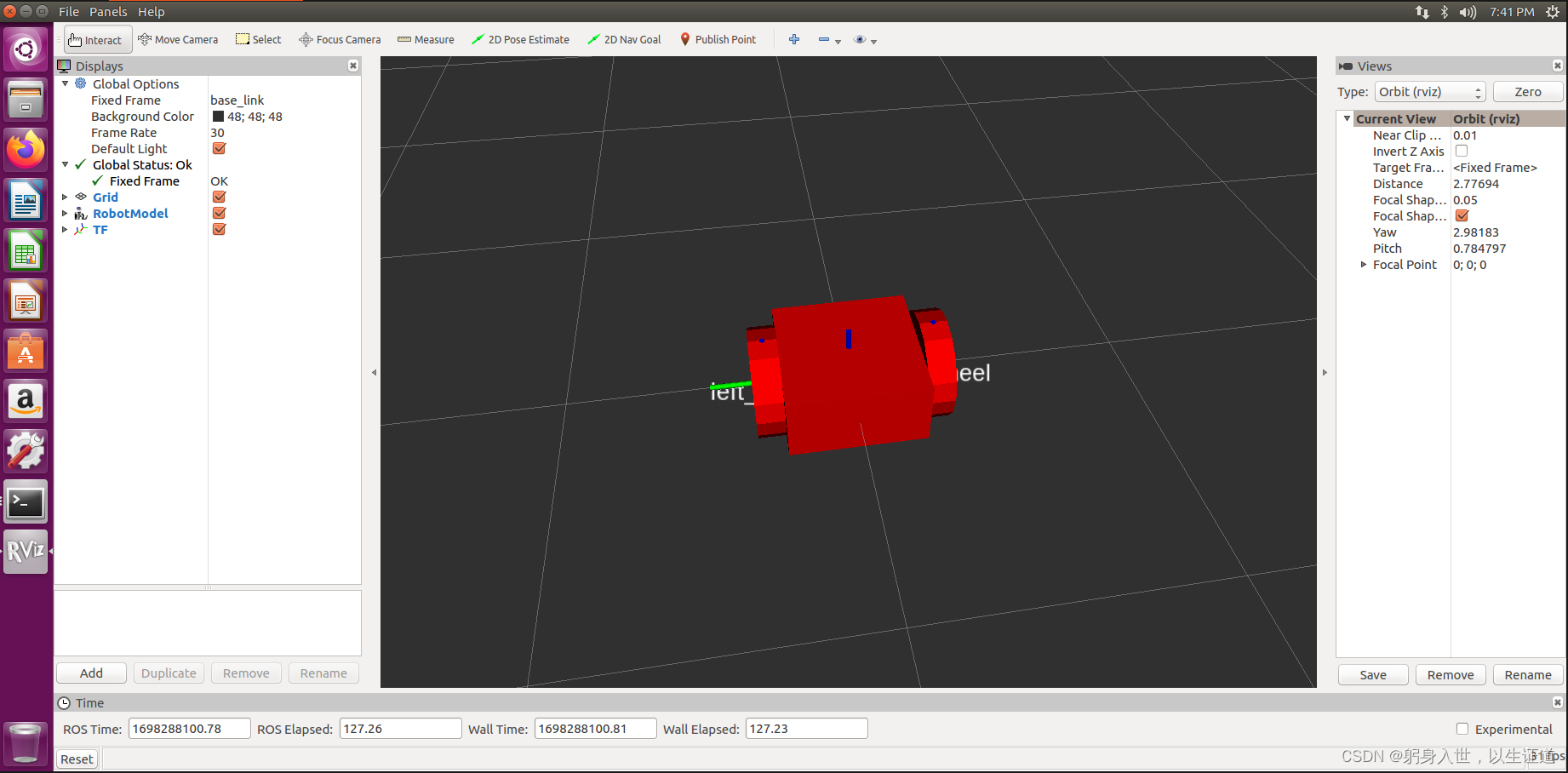
机器人入门(四)—— 创建你的第一个虚拟小车
创建第一个虚拟小车