




- @weixin_44126988
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
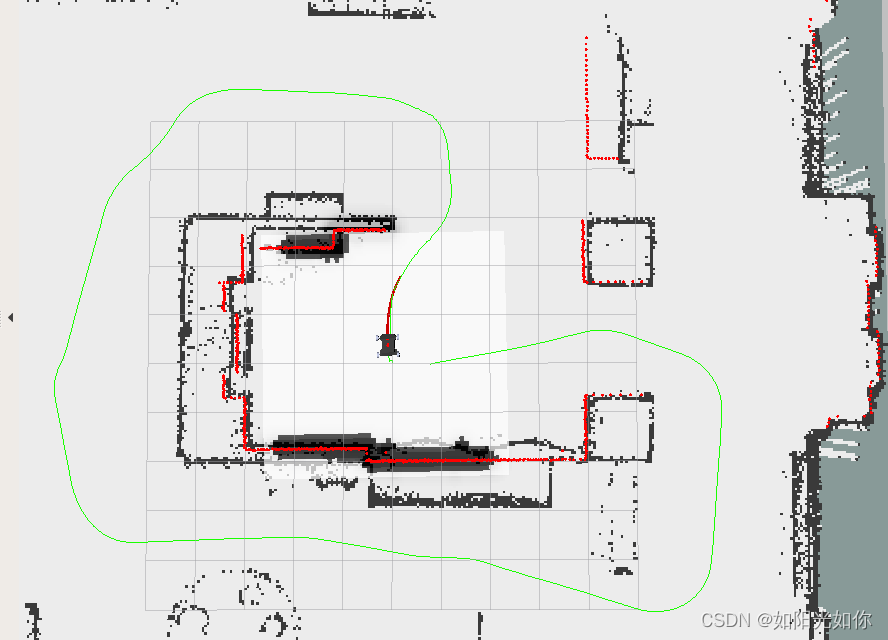
之前基于ros1写过一篇读取机器人移动轨迹并在Rviz中显示,随着ros2的普遍使用,本文将ros1的代码进行迁移,以期能够在ros2中使用。
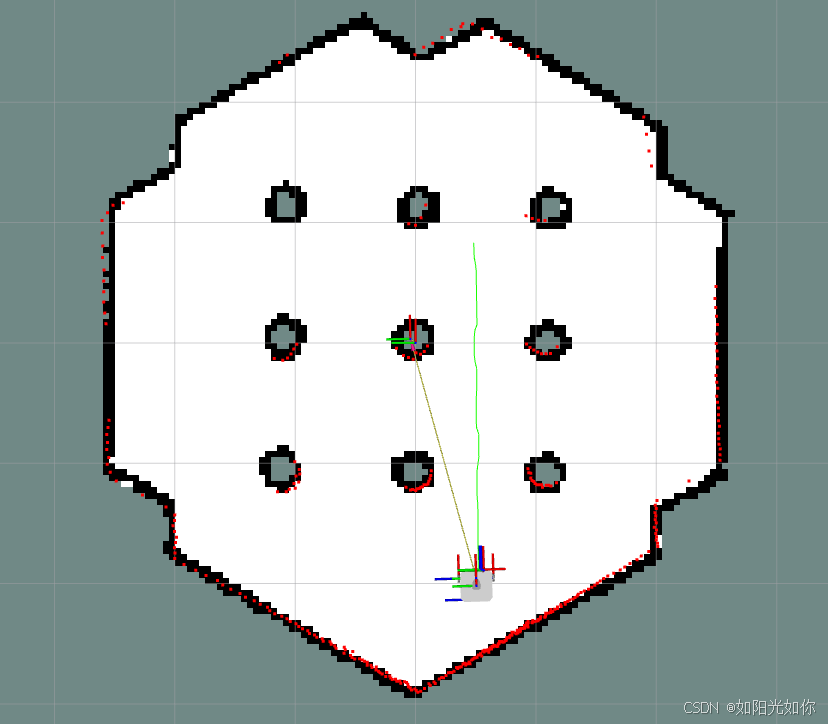
机器人在小场景下运动时,应该尽可能在运动过程中保持直线前进和后退,减少运动过程中的旋转,因此,在机器人接收到目标点后先旋转朝向目标点方向,然后沿着直线路径运动到达目标点,最后旋转进行姿态的纠正(不考虑途中的障碍物)。
Slam Toolbox 是 Steve Macenski 在 Simbe Robotics 工作时构建的一套用于 2D SLAM 的工具和功能包,其支持基本的2D SLAM建图,支持自动、手动保存pgm地图;支持加载已保存好的地图,并进行地图的更新;支持无地图定位及有地图定位(类似AMCL);支持同步和异步构建地图等功能。

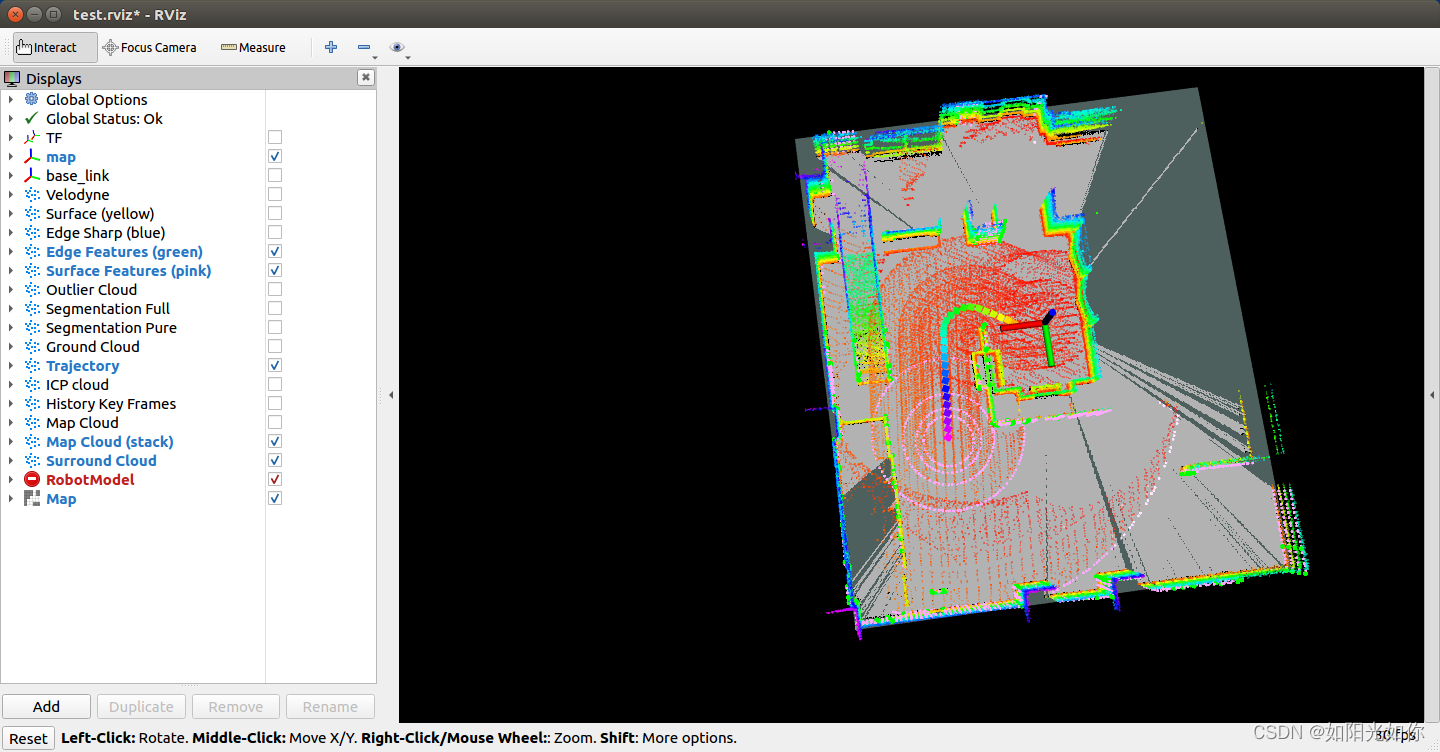
Lego_LOAM和LIO_SAM的基本使用
Pure Pursuit是一种基于几何追踪的路径跟踪算法,使车辆或者机器人沿着预定轨迹进行运动,控制方法简单,无需过多考虑运动学和动力学模型,广泛应用于车辆和移动机器人领域,实现路径跟踪。
本文介绍如何使用PID算法控制机器人进行路径跟踪。
ROS运动规划学习二---nav_core
机器人在小场景下运动时,应该尽可能在运动过程中保持直线前进和后退,减少运动过程中的旋转,因此,在机器人接收到目标点后先旋转朝向目标点方向,然后沿着直线路径运动到达目标点,最后旋转进行姿态的纠正(不考虑途中的障碍物)。
在ROS中编写自己全局路径规划插件实现固定路线规划。
ROS运动规划学习七---base_local_planner