




- @weixin_42963026
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
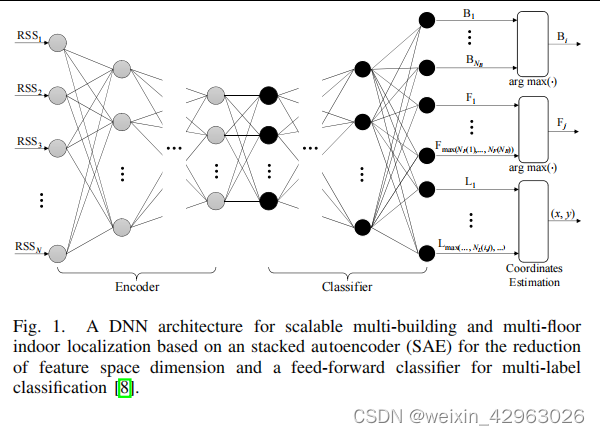
深度神经网络(DNNs)在多建筑物、多楼层室内定位中的常规应用是基于三维位置坐标(如经度、纬度和海拔高度(如楼层高度))的纯回归,位置标签的分类(如建筑物、楼层和房间信息),或标签和坐标(如建筑物、楼层信息和二维位置坐标)的混合分类/回归,然而,没有考虑室内定位数据固有的分层辅助信息(例如,建筑物-楼层-位置)。这种传统的DNNs应用在建筑物和楼层数量较大的大规模室内定位中面临可扩展性问题。将分类

学习笔记第3章神经网络从感知机到神经网络神经网络的例子图 3-1中的网络一共由 3层神经元构成,但实质上只有 2层神经元有权重,因此将其称为“2层网络”。请注意,有的书也会根据构成网络的层数,把图 3-1的网络称为“3层网络”。本书将根据实质上拥有权重的层数(输入层、隐藏层、输出层的总数减去 1后的数量)来表示网络的名称。复习感知机激活函数登场刚才登场的hx)函数会将输入信号的总和转换为输出信号,

本文提出了用于WiFi指纹室内定位的递归神经网络(rnn)。与传统算法一次定位一个移动用户的位置不同,我们的RNN解决方案旨在定位轨迹,并考虑到轨迹中接收信号强度指标(RSSI)测量之间的相关性。为了提高RSSI时间波动之间的准确性,对输入RSSI数据和顺序输出位置都提出了加权平均滤波器。介绍了不同类型的RNN,包括vanilla RNN、长短期记忆(LSTM)、门控循环单元(GRU)、双向RNN
提出了一种将极限学习机自编码器(extreme learning machine autoencoder, ELM-AE)与二维CNN相结合的模型
本文针对RSSI 指纹室内定位中采样成本高、数据稀疏、环境干扰导致匹配不准的问题,提出稀疏采样策略与SGC-AGPR 小样本定位模型:通过改进 GAN生成高质量指纹数据训练高斯过程回归(GPR),为虚拟参考点提供初始指纹,再利用简化图卷积(SGC)融合空间拓扑与自适应相似度权重完成指纹增强;最终在8m×8m实验区域实现平均定位误差 0.84m,精度超越传统密集采样与稀疏直接定位方法,大幅降低离线建
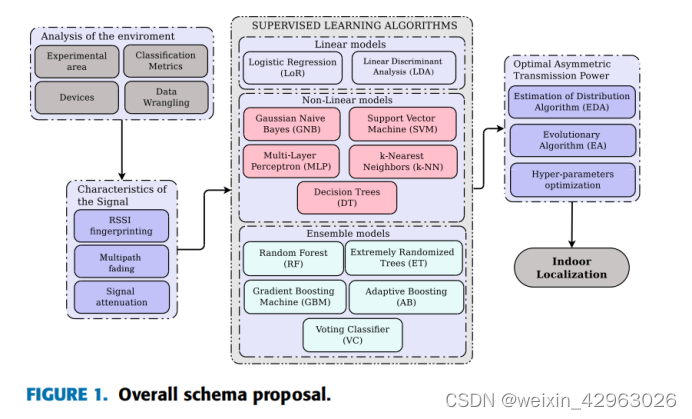
物联网(IoT)的发展得益于1)具有多个传感器的设备之间的连接;2)无线网络;3)对采集的数据进行处理和分析。对物联网技术使用的兴趣日益增长,导致了许多不同应用程序的开发,其中许多是基于终端用户的位置和配置文件的知识。本文研究了12种不同的监督学习算法对蓝牙信号行为的表征,作为发展基于指纹定位机制的第一步。然后,探索使用元启发式方法来确定最佳的无线电功率传输设置,评估定位机制的精度和平均误差。进一
学习笔记第3章神经网络从感知机到神经网络神经网络的例子图 3-1中的网络一共由 3层神经元构成,但实质上只有 2层神经元有权重,因此将其称为“2层网络”。请注意,有的书也会根据构成网络的层数,把图 3-1的网络称为“3层网络”。本书将根据实质上拥有权重的层数(输入层、隐藏层、输出层的总数减去 1后的数量)来表示网络的名称。复习感知机激活函数登场刚才登场的hx)函数会将输入信号的总和转换为输出信号,
本文提出了用于WiFi指纹室内定位的递归神经网络(rnn)。与传统算法一次定位一个移动用户的位置不同,我们的RNN解决方案旨在定位轨迹,并考虑到轨迹中接收信号强度指标(RSSI)测量之间的相关性。为了提高RSSI时间波动之间的准确性,对输入RSSI数据和顺序输出位置都提出了加权平均滤波器。介绍了不同类型的RNN,包括vanilla RNN、长短期记忆(LSTM)、门控循环单元(GRU)、双向RNN
提出了一种将极限学习机自编码器(extreme learning machine autoencoder, ELM-AE)与二维CNN相结合的模型
本文提出了用于WiFi指纹室内定位的递归神经网络(rnn)。与传统算法一次定位一个移动用户的位置不同,我们的RNN解决方案旨在定位轨迹,并考虑到轨迹中接收信号强度指标(RSSI)测量之间的相关性。为了提高RSSI时间波动之间的准确性,对输入RSSI数据和顺序输出位置都提出了加权平均滤波器。介绍了不同类型的RNN,包括vanilla RNN、长短期记忆(LSTM)、门控循环单元(GRU)、双向RNN