




- @weixin_42930866
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
摘要:本文介绍了使用TsClaw配置微信远程控制权限的步骤。前置条件包括安装最新版TsClaw和微信(iOS 8.0.70+/安卓8.0.68+)。配置提供两个入口:通过对话消息渠道或更多设置中的智能体配置,扫码授权后即可连接。注意事项包括妥善保管二维码和修改微信备注名以便识别。常见问题排查涉及检查TsClaw运行状态、网络连接和微信版本更新。

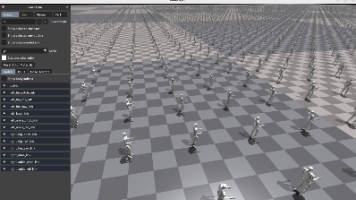
本文详细介绍了基于Isaac Gym平台实现G1机器人强化学习控制的全流程。主要内容包括:硬件配置要求(需NVIDIA显卡支持CUDA)、环境搭建步骤(conda虚拟环境创建、PyTorch和Isaac Gym安装)、代码配置修改、模型训练与测试方法。文章提供了完整的命令行操作指南,并针对常见问题给出解决方案,帮助开发者快速实现G1机器人的RL控制算法开发。关键步骤涵盖训练可视化配置、中断续训方法
Hermes默认只能在终端使用,局限性很大:必须登录服务器、打开终端才能操作。而部署成Telegram/Discord机器人后,你可以:手机/电脑随时随地聊天、调用工具(无需登录服务器)多设备同步对话历史(和Hermes终端对话同步)邀请好友一起使用(设置权限即可)结合定时任务,让Hermes定时推送消息到Telegram/DiscordHermes内置消息网关,部署过程非常简单,无需额外开发,一

Hermes-Agent 是NousResearch开源的轻量级、生产级AI智能体框架,支持终端对话、多平台消息网关、工具调用、定时任务、浏览器自动化、文件检索,代码结构极简、扩展性极强,非常适合学习Agent工作原理!本篇基于GitHub官方主分支源码整体架构分层核心入口与启动流程LLM对接、工具调用、记忆系统源码配置系统、命令行系统二次开发最佳实践建议,下期带来《Hermes自定义工具/插件开

本文为零基础小白提供了一份本地AI聊天机器人搭建指南。教程使用Ollama+Gradio方案,无需编程基础或高端显卡,8GB内存电脑即可运行。主要内容包括:Python环境配置、Ollama工具安装、轻量级中文模型下载、依赖库安装,以及命令行和网页两种交互模式的启动方法。文章特别强调简单易操作,所有步骤仅需复制粘贴命令,并提供常见报错解决方案和完整项目源码获取方式。通过40-90分钟的操作,用户可

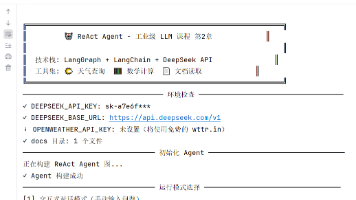
本文介绍了基于ReAct框架的多功能Agent开发实战项目,结合LangGraph、LangChain和DeepSeek API等技术栈。项目亮点包括:1)实现天气查询、数学计算和文档读取三大功能;2)采用"思考-行动-观察"的ReAct推理循环;3)提供完整的项目结构和工具封装方法。开发者通过2-3小时即可掌握Agent开发核心技能,包括LangGraph图构建、工具封装和A
当 AI 大模型(GPT/Claude/Gemini)解决了"思考与理解"的问题后,真正决定智能体价值的,是它能否落地执行、操作现实与数字世界的能力。OpenClaw 作为企业级 AI 网关平台,其核心竞争力之一,就是构建了一套安全、可控、可扩展、全类型覆盖的工具(Tools)系统——这是让 AI 从"只会说话的嘴",变成"能动手干活的手脚"的关键基础设施。官方文档《Tools》(https://
摘要: 本文详细介绍了如何在Hermes-Agent中快速开发自定义工具,通过5分钟实现文件查询功能。步骤包括:准备环境、创建工具目录、编写工具代码(继承BaseTool类、定义参数与执行逻辑)、验证工具加载。文章还提供了进阶技巧(多参数扩展、工具打包)和常见问题解决方案,帮助开发者轻松集成专属功能到AI智能体中。核心在于插件化设计,无需修改源码即可实现高效定制,适合对接内部系统或特定API场景。

Hermes Agent是NousResearch开源的轻量、强大、可扩展AI智能体,支持终端对话、多平台消息网关(Telegram/Discord/Slack)、浏览器自动化、定时任务、TTS语音、文件搜索等能力,一键对接主流大模型,开箱即用!本文基于官方文档整理,流程最清晰、代码最完整、避坑最全面,建议先,部署时不迷路!本文把Hermes Agent官方安装流程完整翻译成中文保姆级教程,极速安

在 AI 智能体与编程助手爆发的当下,作为一款强大的开源 AI 编程智能体,凭借灵活的 SDK 设计、完善的工具链与会话管理能力,成为构建深度定制化 AI 助手的首选底层框架;而OpenClaw则是面向多渠道(Discord、Slack、Telegram、WhatsApp 等)的企业级 AI 网关平台,核心需求是将独立的 AI 智能体能力,无缝嵌入自身的消息流转、权限管控、沙箱安全体系中,实现“一
