- @weixin_42878111
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在数字经济时代,数据库已成为企业数字化转型的核心基础设施,尤其是对于资产规模庞大、业务系统复杂的电力行业。某大型省级电力集团下辖20余家供电公司,服务超过2000万电力客户,其核心业务系统每天处理超过5000万条数据记录。然而,随着数据量以年均30%的速度激增,传统数据库的“高投入、低效率”运维模式正成为压在信息科肩上的沉重负担。
轻量级日志监控告警方案 本文介绍了一个基于Python的轻量级日志监控方案,适用于家庭服务器和小型服务环境。方案通过实时扫描日志文件中的关键词(如"error"、"failed"等),在发现异常时通过钉钉机器人自动发送告警消息。 主要实现步骤: 获取钉钉机器人Webhook和签名秘钥 编写Python脚本监控指定日志文件 脚本记录读取位置,只处理新增日志内容 匹配到关键词后发送带主机名、时间和日志

本文探讨了大语言模型(LLM)与量子纠缠理论在数学结构、信息机制和工程架构三个层面的深刻共鸣。研究发现,LLM通过注意力机制构建的token关联网络与量子纠缠态的多粒子关联具有数学同构性。2025—2026年的前沿研究显示:1)LoRA微调中的参数更新呈现"纠缠谷"现象,遵循量子态的低秩分解规律;2)量子增强注意力机制利用纠缠感知核函数,能产生更全局连贯的语义关联;3)多智能体系统通过共享纠缠态可

工业时序大模型TimechoAI以83亿参数Timer-3.5为核心,解决工业物联网"数据沉睡"痛点,通过TimeMoE和TimeSTP创新架构实现20倍推理速度提升。平台提供预测、异常检测等四大核心能力,已在能源、制造等领域落地,获多项权威认证,重塑"存储→分析→决策"全链路智能范式。

本文探讨了如何利用国产大模型(如Qwen、DeepSeek)结合魔珐星云SDK搭建企业展厅AI讲解系统。作者指出,虽然国产大模型在文本生成、推理等方面表现优异,但缺乏具身表达能力,导致数字人讲解效果不佳。通过对比拼接路线和云端视频流方案的缺陷,提出采用魔珐星云的参数流架构,大幅降低带宽和算力成本。文章详细记录了开发过程,包括SDK接入、状态封装等关键节点,展示了国产技术栈在具身交互场景下的可行性,

OpenWebUI:本地大模型的终极可视化控制台 OpenWebUI是一个开源的Web界面,为Ollama等本地大模型提供接近主流AI产品的交互体验。它能统一管理多种来源的模型,支持对话历史、Markdown渲染、知识库等功能,解决了命令行工具体验不足的问题。 核心优势包括: 媲美ChatGPT的交互界面 多模型统一管理(本地Ollama/云端API) 内置RAG知识库和工具调用能力 完全离线运行

摘要: 2026年,中国首次将时序数据库纳入国家安全可靠测评体系,标志着时序数据作为关键基础设施核心资产的地位被正式确认。时序数据广泛应用于电网、石化、新能源等领域,其自主可控关乎国家安全。天谋科技的TimechoDB和智臾科技的DolphinDB通过认证,填补了国产化空白。在此基础上,TimechoAI提供低门槛的时序数据分析服务,支持预测性维护、新能源出力预测等场景,无需专业算法团队即可实现趋

> **定位:** 面向大模型算法工程师/Agent开发工程师,难度偏高,适合区分"用过"和"真正理解"的候选人。> **覆盖维度:** 推理优化、模型微调、Agent架构、RAG、记忆机制、Prompt工程、评估体系、多模态。

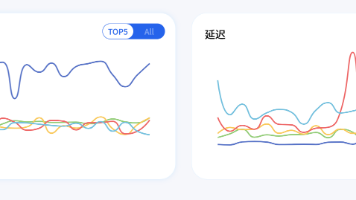
智能客服选型踩坑记:隐性成本才是大坑 团队为日活几千的智能客服系统选型大模型API,原以为只需关注模型效果和标价,结果两个月踩坑发现:隐性成本才是关键。首轮测试中,P95延迟飙至4.7秒,用户流失严重;次轮72小时压测揭示供应商间吞吐量差距达41%,延迟稳定性差异显著(蓝耘波动系数仅1.23倍)。实际成本测算显示,隐性成本(重试、超时)占比高达45%,而蓝耘因低延迟和稳定性,实际月成本节省35%。
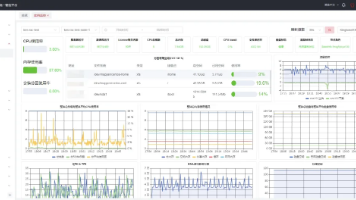
本文探讨了数据库自动运维Agent的权限边界问题,指出通用Agent作为"外部观察者"存在内核数据获取和安全风险隐患。提出"数据库-专业管控平台-Agent"三层架构,强调中间层需具备内核级数据采集、安全隔离和精准执行能力。以金仓KEMCC为例,说明原生管控平台在指标采集、诊断深度、执行安全和审计合规方面的不可替代性。未来将通过标准化接口实现Agent与管控平台协同,在保障数据库确定性的前提下推进