




- @weixin_42576734
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文通过两个教育案例,展示了如何利用低成本技术工具(TIA Portal、Unity引擎及Game4Automation框架)构建离散制造场景下的数字孪生系统。研究聚焦于工业4.0教育场景中的技术可及性与实践方法论,提出了从物理硬件配置、虚拟模型开发到双向通信集成的完整工作流程。案例验证了该方案在降低教学成本、提升学生技术理解力方面的有效性,并讨论了未来在复杂工业系统仿真与混合现实(XR)培训中的

2026年人形机器人技术发展综述 2026年被视为人形机器人产业发展的关键转折点,标志着该技术从实验室走向商业化应用。报告系统梳理了人形机器人"感知-决策-执行"与"脑-小脑-肢体"融合的技术架构,重点分析了三大核心板块:硬件系统实现轻量化设计和高性能驱动;感知系统采用多模态融合方案;软件与智能系统由AI大模型技术驱动,包括VLA模型、强化学习和世界模型等前
2026年人形机器人技术发展综述 2026年被视为人形机器人产业发展的关键转折点,标志着该技术从实验室走向商业化应用。报告系统梳理了人形机器人"感知-决策-执行"与"脑-小脑-肢体"融合的技术架构,重点分析了三大核心板块:硬件系统实现轻量化设计和高性能驱动;感知系统采用多模态融合方案;软件与智能系统由AI大模型技术驱动,包括VLA模型、强化学习和世界模型等前
本文探讨了人工智能技术在锅炉自动化改造中的应用研究。通过整合PLC、SCADA系统和AI技术,构建了智能锅炉控制系统,实现从手动操作到全自动化的转型升级。研究采用传感器网络实时监测温度、压力、液位等关键参数,利用PLC执行控制逻辑,SCADA系统提供可视化监控界面。重点阐述了AI技术在预测性维护、工艺优化和异常检测方面的优势,分析了系统架构中各模块的协同工作机制。研究结果表明,该方案能显著提升锅炉
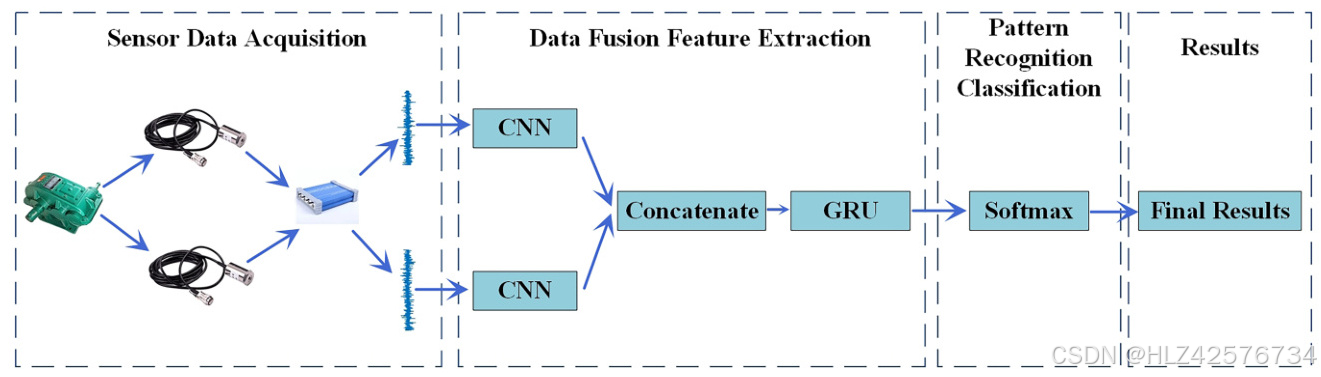
传感器数据 → 实时采集 → 预处理(去噪/归一化) → 滑动窗口分割 → CNN提取空间特征 → RNN提取时序特征 → 全连接层分类 → 结果输出与反馈注:具体实现需根据传感器类型(如振动、光学、惯性)调整预处理和模型结构,例如光学数据可参考的加权平均特征融合方法,而惯性数据可结合的滑动窗口特征提取。
传感器数据 → 实时采集 → 预处理(去噪/归一化) → 滑动窗口分割 → CNN提取空间特征 → RNN提取时序特征 → 全连接层分类 → 结果输出与反馈注:具体实现需根据传感器类型(如振动、光学、惯性)调整预处理和模型结构,例如光学数据可参考的加权平均特征融合方法,而惯性数据可结合的滑动窗口特征提取。
不同版本的DeepSeek模型对硬件的要求差异显著。1.5B版本适合低配硬件和简单任务,而671B版本则需要极高的计算资源和显存。
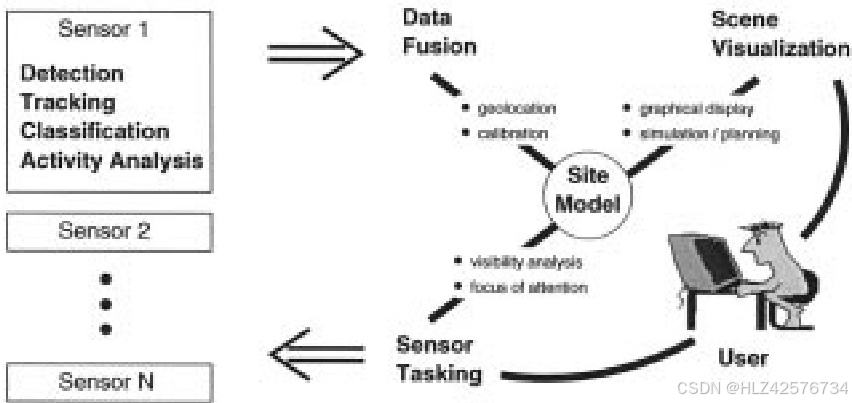
随着现代技术,特别是在自动驾驶、军事国防和无人系统等领域的飞速发展,单一传感器的局限性日益凸显,多传感器数据融合(Multi-Sensor Fusion, MSF)已成为构建精确、鲁棒和全面环境感知的关键。随着现代技术,特别是在自动驾驶、军事国防和无人系统等领域的飞速发展,单一传感器的局限性日益凸显,多传感器数据融合(Multi-Sensor Fusion, MSF)已成为构建精确、鲁棒和全面环境
多传感器输入:从不同类型的传感器(如摄像头、LiDAR、温度传感器等)收集原始数据,确保覆盖多维信息。数据标准化:通过归一化处理消除量纲差异,例如将振动、声学等信号统一到相同尺度。异常值处理:去除噪声或无效数据,例如使用滤波算法或统计方法(如标准差分析)。特征提取:对每个传感器的数据提取关键特征,如信号频域特征(振动传感器)或图像中的边缘特征(摄像头)。时空对齐:通过时间同步和空间注册(如自适应距
传感器数据 → 实时采集 → 预处理(去噪/归一化) → 滑动窗口分割 → CNN提取空间特征 → RNN提取时序特征 → 全连接层分类 → 结果输出与反馈注:具体实现需根据传感器类型(如振动、光学、惯性)调整预处理和模型结构,例如光学数据可参考的加权平均特征融合方法,而惯性数据可结合的滑动窗口特征提取。