
写文章




- @weixin_42483745
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
【opencv 相机内参解释 opencv内参标定】
(1)标定的目的在进行相机标定之前一定要搞清楚相机标定的目的,简单的说,相机标定主要是根据标定板在相机下的不同位置去求解出相机的内参和外参。内参是相机的固有属性,也就是说无论你标定板如何放置,你的相机固不固定,相机的内参不受影响,但是内参的准确性与标定板图像的个数有关,一般而言标定板放置的位置越全面,相机的内参越准确,误差越小。对于相机的外参而言,是世界坐标系相对于相机坐标系的空间变换(旋转矩阵和

【C++ map的常见用法(详细)、map中insert用法、pair用法】
/使用默认构造函数 pair < int , double > p2(1 , 2.4);//用给定值初始化 pair < int , double > p3(p2);//拷贝构造函数//使用默认构造函数 p1 . first = 1;

【gnuplot halcon c++ opencv绘制函数】
【代码】【gnuplot halcon c++ opencv绘制函数】

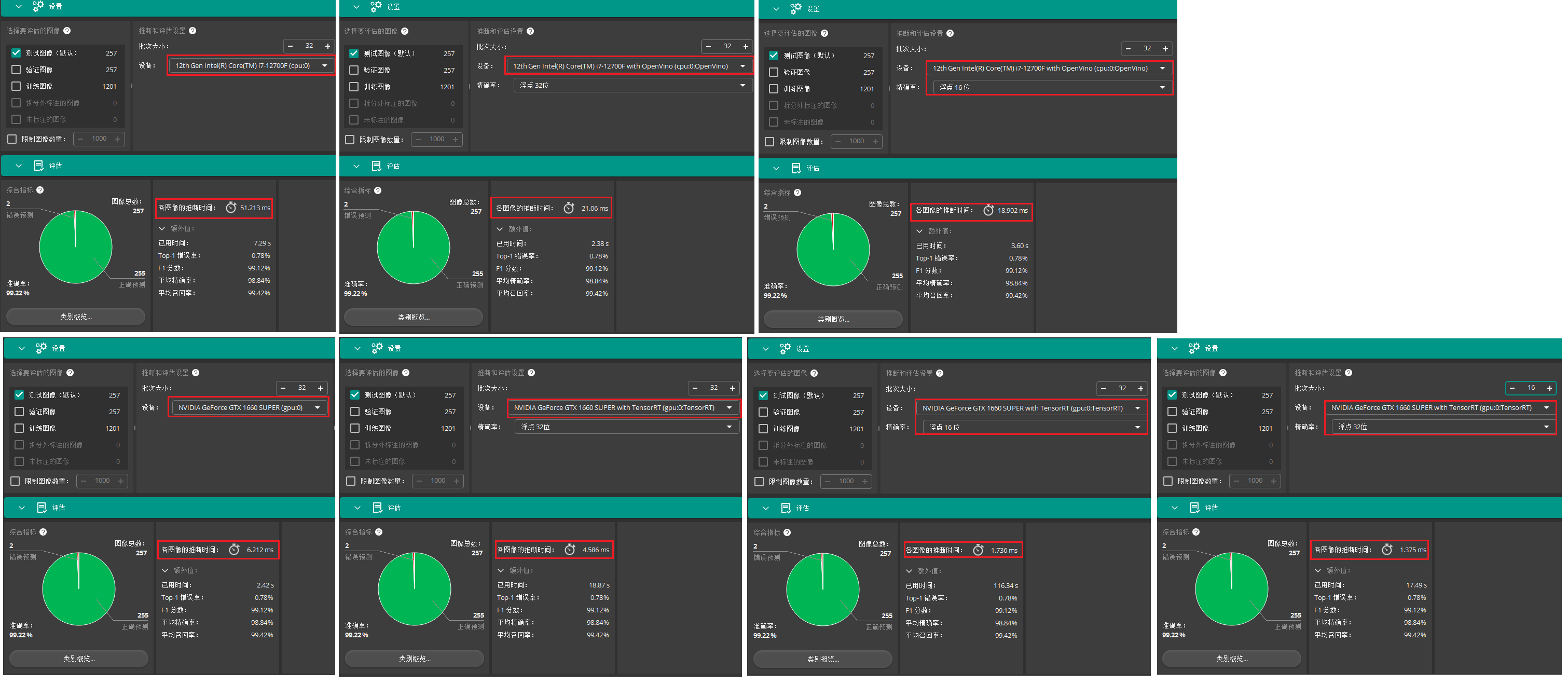
【GPU/CPU/TensorRt/OpenVINO推理速度】
时间引擎模式51ms12th Gen Intel® Core™ i7-12700F (cpu:0)21ms12th Gen intel® core™ i7-12700F with OpenVino (cpu:0:0penVino) Float3218ms12th Gen intel® core™ i7-12700F with OpenVino (cpu:0:0penVino) Float16时间引
【c# opencv】
MainWindow.xamlMainWindow.xaml.csopencv.csWindow1.xamlWindow1.xaml.cs

到底了