- @weixin_39588099
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
一方面,蘑菇种类繁多,不同种类的形态、颜色、纹理差异大,且生长环境多样(如森林、农田、人工培育大棚等),全面采集不同种类、不同场景下的蘑菇图像难度高;通过在大棚内部署摄像头,结合基于数据集训练的检测模型,系统能实时监测蘑菇的生长状态(如生长阶段、密度),统计蘑菇数量,判断是否存在病虫害导致的异常形态。设备能快速检测原料中的蘑菇,区分不同种类的蘑菇(如香菇、平菇、金针菇等),同时识别腐烂、畸形的蘑菇

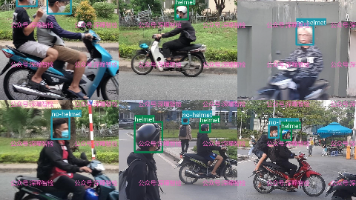
科研人员可基于此数据集,开展针对 “小目标识别”(头盔在图像中占比可能较小)、“复杂背景下分类”(如校园人流密集场景)的算法优化,对比不同 YOLO 模型(如 YOLOv5、YOLOv8)在头盔检测任务中的准确率、速度表现,进而提出更高效的目标检测方案,推动相关技术的发展。数据集聚焦真实生活场景,涵盖了 “佩戴头盔” 与 “未佩戴头盔” 两类核心情况,填补了部分场景下头盔识别数据资源的空白,旨在为
从样本图像来看,数据集覆盖了多样化的牛只行为场景:包含不同品种、不同年龄的牛只,且图像中存在自然的光照变化、角度差异与背景干扰,模拟了牧场中的真实视觉条件。标注的四类行为均为牛只高频出现的状态,其中 “发情” 行为的标注更是精准捕捉了牛只爬跨等关键动作,为模型学习行为特征提供了准确的监督信息。研发人员可基于数据集的多样化样本,验证算法在不同光照、角度、行为类型下的识别精度,进而改进模型结构或训练策

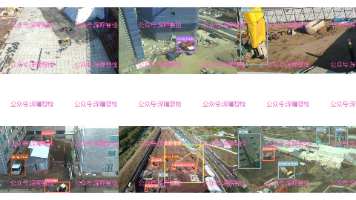
而本数据集聚焦 “无人机航拍视角下的施工工地”,填补了这一细分场景的数据空白,为智慧工地的 AI 应用提供了基础支撑。从场景来看,数据集覆盖了不同类型的工地(如土方作业区、建筑主体施工区),包含了不同天气、不同时段的航拍图像,同时涵盖了 “设备遮挡、密集分布” 等真实工地中常见的复杂情况,让训练出的模型更能适应实际应用场景。部分地区对工地的设备类型、作业时段有明确规范,通过目标检测模型,可自动核查
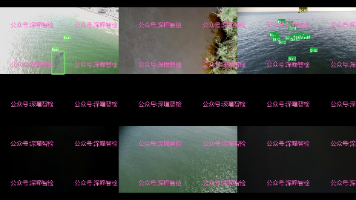
因此,构建面向无人机航拍场景的海洋生物检测数据集,支撑自动化检测算法的训练与评估,对提升海洋生态研究与管理的效率具有重要意义。基于本数据集训练的检测模型,可自动识别大型船舶、标记物等目标,为污染溯源、应急响应和灾后评估提供数据支持。在渔业管理中,基于本数据集训练的检测模型,可自动识别航拍图像中的小型船只、游钓鱼类和饵料投放区域,辅助渔业部门进行资源评估、非法捕捞监测和渔业执法,提升渔业管理的精准度
•挖掘机(excavator):矿场中用于土石方挖掘、装载的核心设备,是场景中最常见的重型机械之一。•自卸卡车(dump_truck):负责将挖掘的物料运输至指定区域的运输车辆,是矿场物料流转的关键环节。•轮式装载机(wheel_loader):兼具装载、搬运功能的多用途设备,常用于物料的短途转运与场地平整。

数据集包含大量小型、密集、部分遮挡的荔枝样本,可用于训练和优化目标检测模型,提升算法在复杂果园环境中对荔枝的定位精度,解决漏检、误判等问题,为机器人采摘提供精准的目标位置信息。基于数据集中明确的成熟度标注,可研发高效的图像分类算法,实现荔枝成熟度的自动化识别,为 yield 估算提供数据支持,帮助种植者合理安排采摘时间与顺序,提升果实品质与收益。数据集可直接用于荔枝采摘机器人、智能监测设备等硬件的

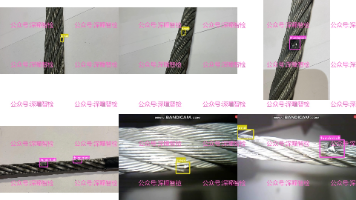
除了直接的工业应用,本数据集还可为计算机视觉领域的算法研究提供支撑。研究人员可基于该数据集开展缺陷检测算法的改进、小样本学习、域自适应等方向的研究,探索更高效的损伤检测技术,进一步推动工业智能检测的技术迭代与应用拓展。该数据集聚焦电缆运行中最常见的两类损伤,通过标准化的图像采集与标注流程,为算法模型提供了可靠的训练与验证依据,助力相关技术在工业场景中快速落地。本数据集以实际工业场景中的电缆为采集对
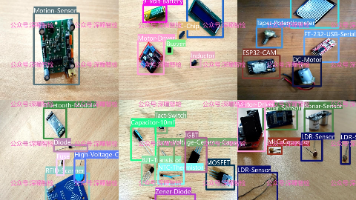
随着计算机视觉与深度学习技术的发展,自动化检测成为趋势 —— 通过算法自动识别 PCB 上的组件并判断其状态,可将检测效率提升 10 倍以上,准确率稳定在 99% 以上。整合过程中,所有图像均保留原始高清质量,仅对 PCB-Vision 数据进行了旋转处理,以确保组件边界框的精准性(减少背景干扰,提升模型训练效率)。在使用该数据集进行学术研究时,应遵守相关的学术规范,引用该数据集的来源,尊重数据集

随着智能制造、智能检修在电子行业的普及,对 “电子元件自动识别” 的需求日益迫切 —— 从生产线元件分拣,到维修场景中快速定位故障部件,都需要可靠的计算机视觉模型支撑。为解决这些问题,耗时数月采集、标注并优化数据,最终推出了电子元件检测数据集,填补了 “多类别、多场景电子元件检测数据集” 的空白。在使用该数据集进行学术研究时,应遵守相关的学术规范,引用该数据集的来源,尊重数据集创作者的劳动成果。下