




- @steven_ysh
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
HDMapNet 是清华大学 MARS Lab 提出的一个构建局部语义地图的方法,该方法为减轻标注、维护高精度地图的资源消耗。本文先简要阐述高精度地图的部分概念,接着简单阐述了 HDMapNet 的主要框架,文末附有 HDMapNet 项目地址
本文是阅读 ECCV2020 论文 NeRF 后所做的笔记。文章首先对论文中 5D 坐标的理解做出相关图示,然后对“世界-相机-图像”三种坐标系的转换以及常见图像质量评估指标进行简单阐述,接着对 NeRF 的网络结构进行详细解释(包括网络主体流程、体渲染、位置编码、多层级采样、损失函数),最后通过训练代码展示训练后的结果

系统要求X64 系统:simulator应该运行在 64 位系统165GB 磁盘空间:CARLA 大概 32GB,定制的 UE4 版本和其他相关软件大概占 133GB足够的 GPU:至少需要 6GB,但通常推荐 8GBTCP 端口与网络连接:默认是 2000 和 2001,使用前确保这两个端口没有被防火墙给 block,端口用于UE4生成的客户端与python的脚本服务器端进行交互软件要求Cmak
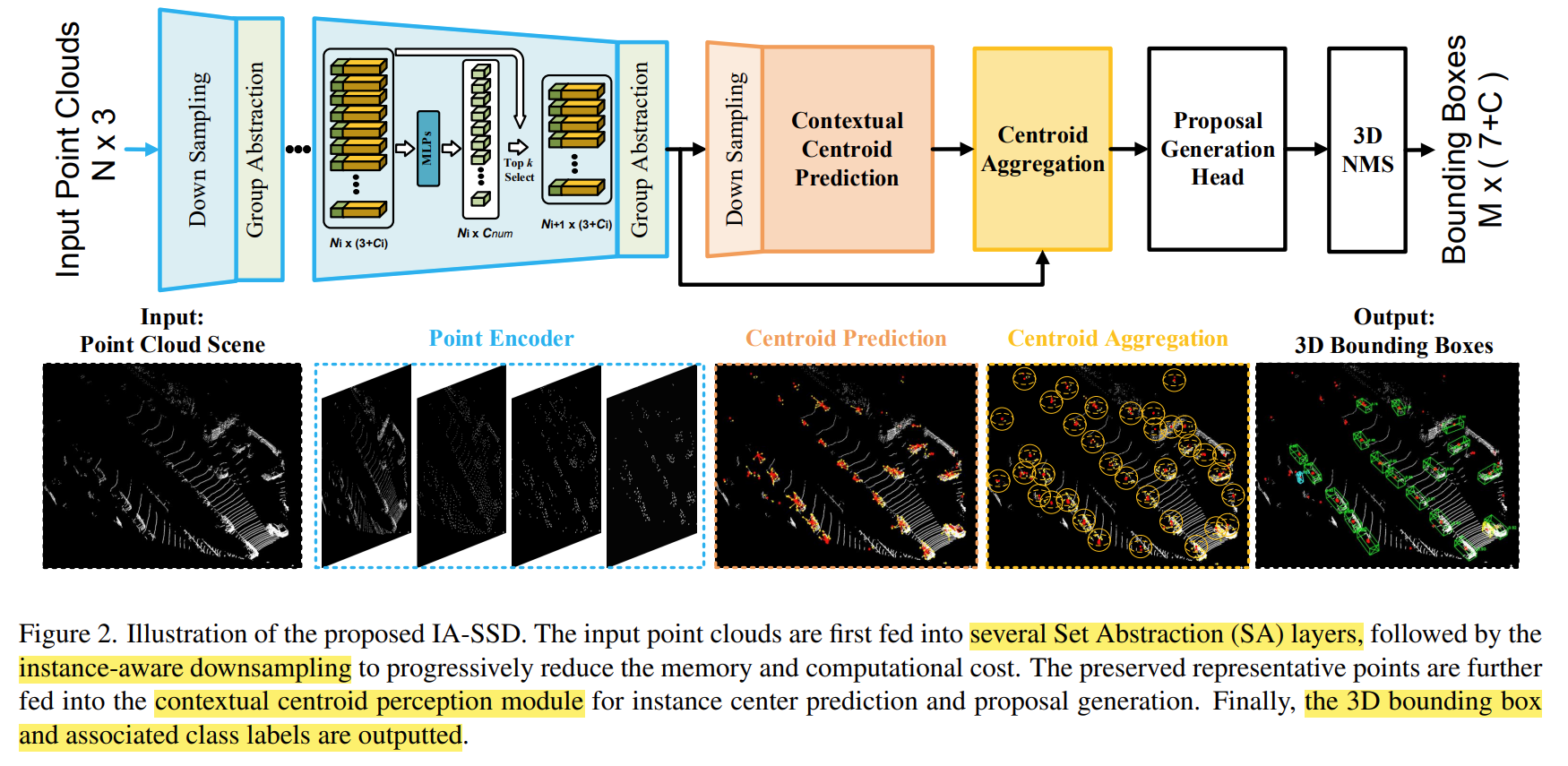
本文是阅读 CVPR 2022 Oral 上的论文 Not All Points Are Equal 后做的笔记,首先简要地介绍当前目标检测中采样过程存在的问题以及 IA-SSD 的优势,然后再详细地介绍 IA-SSD 的网络结构(包括圆实例感知下采样、上下文质心感知模块、建议生成头部),最后再简单地介绍了该网络的损失函数。文末附有论文和代码地址。...
HDMapNet 是清华大学 MARS Lab 提出的一个构建局部语义地图的方法,该方法为减轻标注、维护高精度地图的资源消耗。本文先简要阐述高精度地图的部分概念,接着简单阐述了 HDMapNet 的主要框架,文末附有 HDMapNet 项目地址