- @qq_57425280
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Gmapping是一种基于激光的SLAM算法,它已经集成在ROS中,是移动机器人中使用最多的SLAM算法。这个算法已经由Grisetti等人提出是一种基于Rao-Blackwellized的粒子滤波的SLAM方法。基于粒子滤波的算法用许多加权粒子表示路径的后验概率,每个粒子都给出一个重要性因子。但是,它们通常需要大量的粒子才能获得比较好的的结果,从而增加该算法的的计算复杂性。此外,与PF重采样过程

之前我讲解了循序表以及单链表,接下来我会在介绍几个不同的链表,并举例相关习题使大家能够更加深入的理解。前期内容如下:链接:链接:链接: [双向链表增删查改的代码实现] 紧张制作中。

使⽤QTreeWidget 表⽰⼀个树形控件.⾥⾯的每个元素,都是⼀个QTreeWidgetItem ,每个QTreeWidgetItem 可以包含多个⽂本和图标,每个⽂本/图标为⼀个列.可以给QTreeWidget 设置顶层节点(顶层节点可以有多个),然后再给顶层节点添加⼦节点,从⽽构成树形结构.这种设定⽅式其实并不⽅便.尤其是界⾯如果内容⽐较多,不好计算.⽽且⼀个窗⼝⼤⼩往往是可以调整的,按照

例如:以上就是今天要讲的内容,本文仅仅简单介绍了pandas的使用,而pandas提供了大量能使我们快速便捷地处理数据的函数和方法。

每次终端中执行工作空间下的节点时,都需要调用. install/setup.bash指令或者source install/setup.bash指令,使用不便,优化策略是,可以将该指令的调用添加进~/setup.bash。上述指令执行完毕,将创建ws00_helloworld目录,且该目录下包含build、install、log、src共四个子级目录。vscode官网:https://code.vi

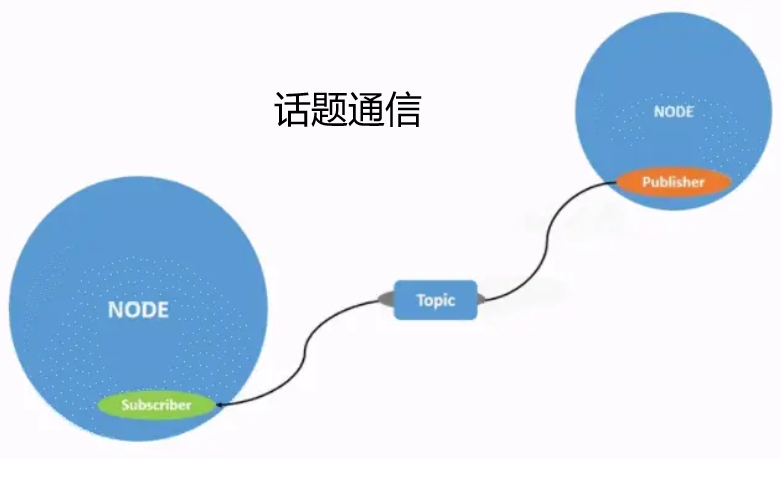
需求:以固定频率发布学生信息功能包cpp01_topic的src目录下,新建C++文件demo03_talker_stu.cpp源码:注意CMakeLists需要修改然后还是编译,运行,这里就不再演示!需求:订阅发布方发布的学生消息,并输出到终端。功能包cpp01_topic的src目录下,新建C++文件demo04_listener_stu.cpp源码:然后还是编译,运行,这里就不再演示!注意C
上一篇文章我讲述了如何使用自己的视频运行ORB-SLAM2,那么本篇,就在用自己视频的基础上更近一步,我来教大家如何使用摄像头运行ORB_SLAM2本篇会涉及到ROS的安装,usb_cam的下载,还有运行ORB_SLAM2的相关知识。

用自己的视屏运行ORB_SLAM2保姆级教程。

此文介绍了C语言中常见的6种指针,对每种指针进行了介绍,并举出相应的例子供大家理解学习.
此步骤的目的在于将录制好的数据集转换为 BundleFusion 所要求的离线输入格式,即 .sens 格式。BundleFusion 提供了将源格式封装成 .sens 格式的实现,因此只需将录制好的数据集存储为源格式即可。新建文件夹SLAM_Picture(此名称随意),在此文件夹下新建文件夹rgb和depth保存提取出来的深度图和彩色图,同时新建文件rgb.txt和depth.txt为对齐时间