- @qq_51022848
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
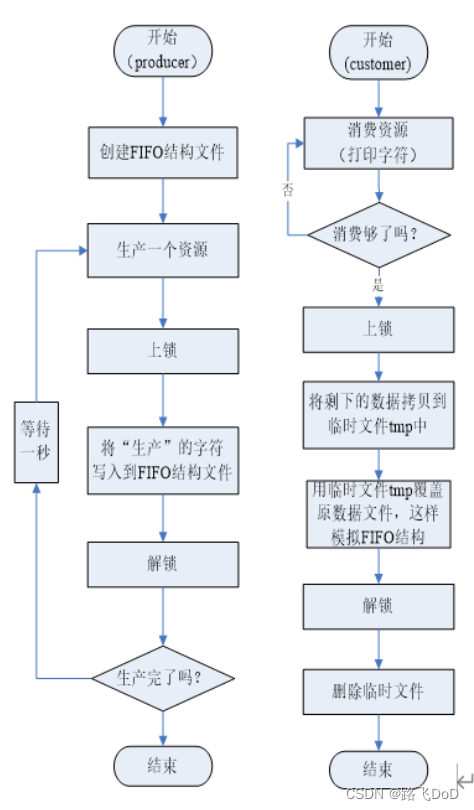
1. 编写程序实现文件写入锁和读取锁的设置和运行;2. 编写程序使用文件操作,仿真FIFO(先进先出)结构以及生产者-消费者运行模型;3. 编写程序实现文件多路复用操作。
1. 编写程序实现文件写入锁和读取锁的设置和运行;2. 编写程序使用文件操作,仿真FIFO(先进先出)结构以及生产者-消费者运行模型;3. 编写程序实现文件多路复用操作。
CuRobo: CUDA加速的机器人库。并行化的无碰撞机器人运动生成。本文将机械臂的表述为。开发了一种优化技术,在大规模并行GPU上证明了该技术的有效性。将简单的优化技术与许多相结合,可以在平均53ms的时间内解决一些困难的运动生成问题,比SOTA轨迹优化方法快62倍。将L-BFGS。

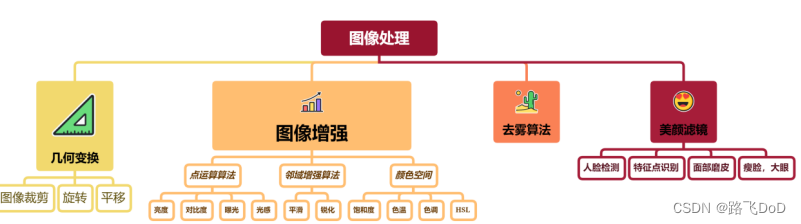
本次课程设计主要聚焦图像增强算法的实现,工程量比较大。前后花费了一周左右的时间,具备一定的挑战性。整个开发过程中遇到的首要难题是相关参考资料较少,相对的碎片化,特别是一些所采用的算法公式准确性有待进一步考究,以及编程能力仍存在明显的欠缺,所实现算法的性能仍有很大的优化空间。对本次课程设计的完成度并不满意,最后没能真正的实现前后端整合,代码封装仍有待优化。希望后续总结完善各部分功能,深入到其背后的算
官网提供了清华大学、南京大学软件镜像网址,但是下载时要区别一下TTC和TTF格式。因此这里选择下载TTF的压缩包文件,选择我们需要的其中一款字体安装即可。换个字体,耳目一新,真可谓差生文具多😁😁😁。找到主题的css样式文件,修改下。快捷键打开设置,搜索。

1. 编写程序实现文件写入锁和读取锁的设置和运行;2. 编写程序使用文件操作,仿真FIFO(先进先出)结构以及生产者-消费者运行模型;3. 编写程序实现文件多路复用操作。
在尝试将主机文件复制粘贴入虚拟机的文件夹中,会出现文件夹崩溃闪退的情况。这里显示为灰色,只需关闭虚拟机,在开机点击即可。从VMware中重装VMwareTools.小文件复制粘贴没问题,大文件复制粘贴仍会闪退。注:解决了,但没完全解决。