- @qq_48764574
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
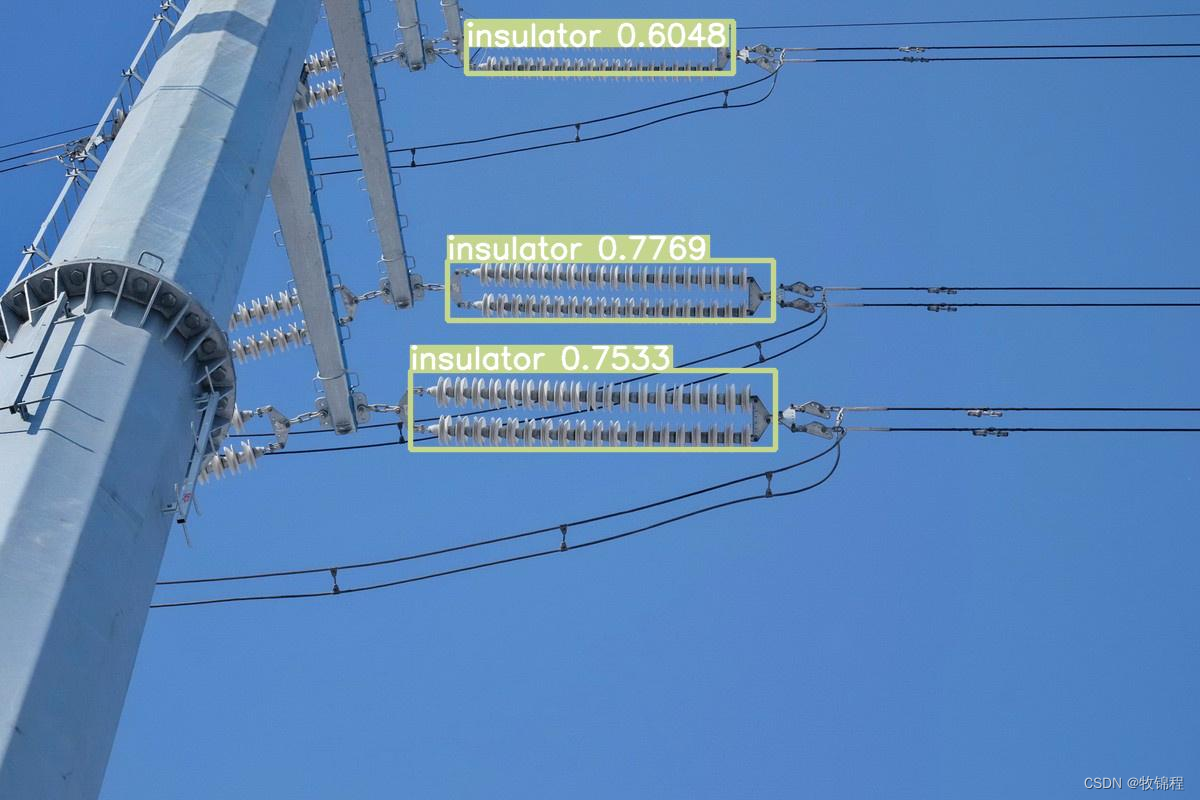
在电力行业,输电线的维护和监控是确保电网稳定运行的关键。绝缘子作为输电线上的重要组成部分,其状态直接影响到电力传输的安全性和可靠性。然而,传统的人工巡检方法不仅耗时耗力,而且存在一定的安全隐患。为了提高输电线维护的效率和安全性,我们启动了这个项目,目的是利用YOLOV8这一先进的深度学习技术,开发一个自动化的输电线绝缘子状态监测系统。
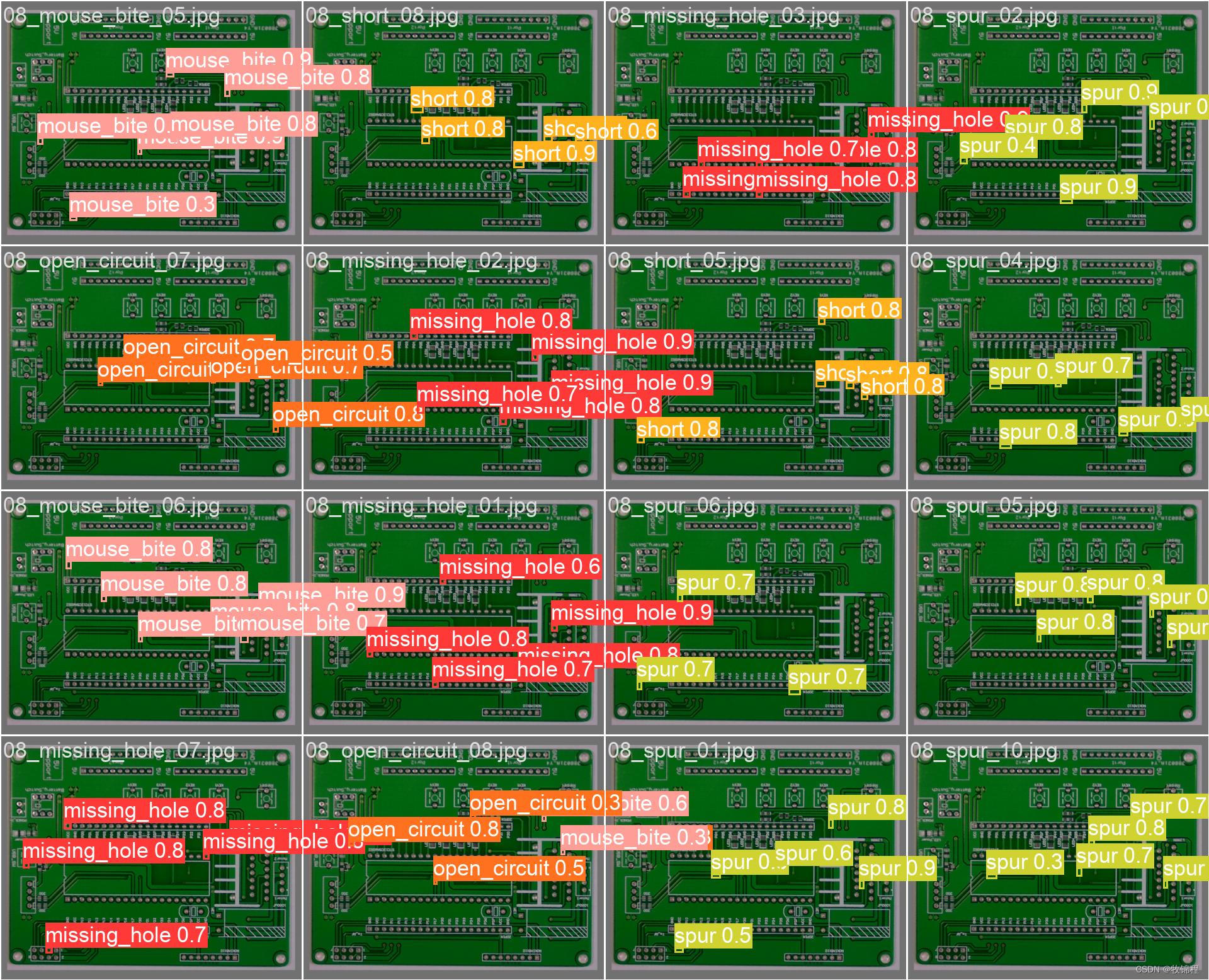
随着电子产品在各个领域的广泛应用,印刷电路板(PCB)作为电子设备的基础组件,其质量和可靠性变得至关重要。然而,由于制造过程中的复杂性和人为因素的介入,PCB常常会出现各种缺陷,如漏孔、老鼠咬痕、断路、短路、尖角和虚铜等问题。这些缺陷可能导致产品性能下降、故障甚至损坏,对产品质量和生产效率造成严重影响。为了提高PCB制造过程中的缺陷检测效率和准确性,我们展开了这个项目,旨在利用先进的深度学习技术构
随着汽车行业的蓬勃发展,驾驶员疲劳驾驶问题日益成为交通安全的一大隐患。疲劳驾驶不仅会降低驾驶员的反应能力,还可能引发严重的交通事故,对个人及社会造成不可估量的损失。尽管市场上已有多种疲劳检测技术,但它们在实时性、准确性以及环境适应性方面仍存在不足。为此,我们引入了YOLOV8这一先进的目标检测算法,结合驾驶员疲劳驾驶数据集,开发了一套创新的疲劳检测系统。

该垃圾堆数据集是通过爬虫从网上进行爬取得到的,一共包含1188张图片,有2个类别,分别为['overflow', 'No Overflow'],两个标签的数量分别为1734个标签和414个标签。
随着智能交通的发展,准确识别交通信号灯对提高道路安全和交通效率有重要的作用。传统的交通信号灯识别方法主要依靠传感器,存在安装成本高、维护困难等问题。为解决这些问题,我们利用YOLOV8技术,开发了基于车载摄像头的交通信号灯自动识别系统。

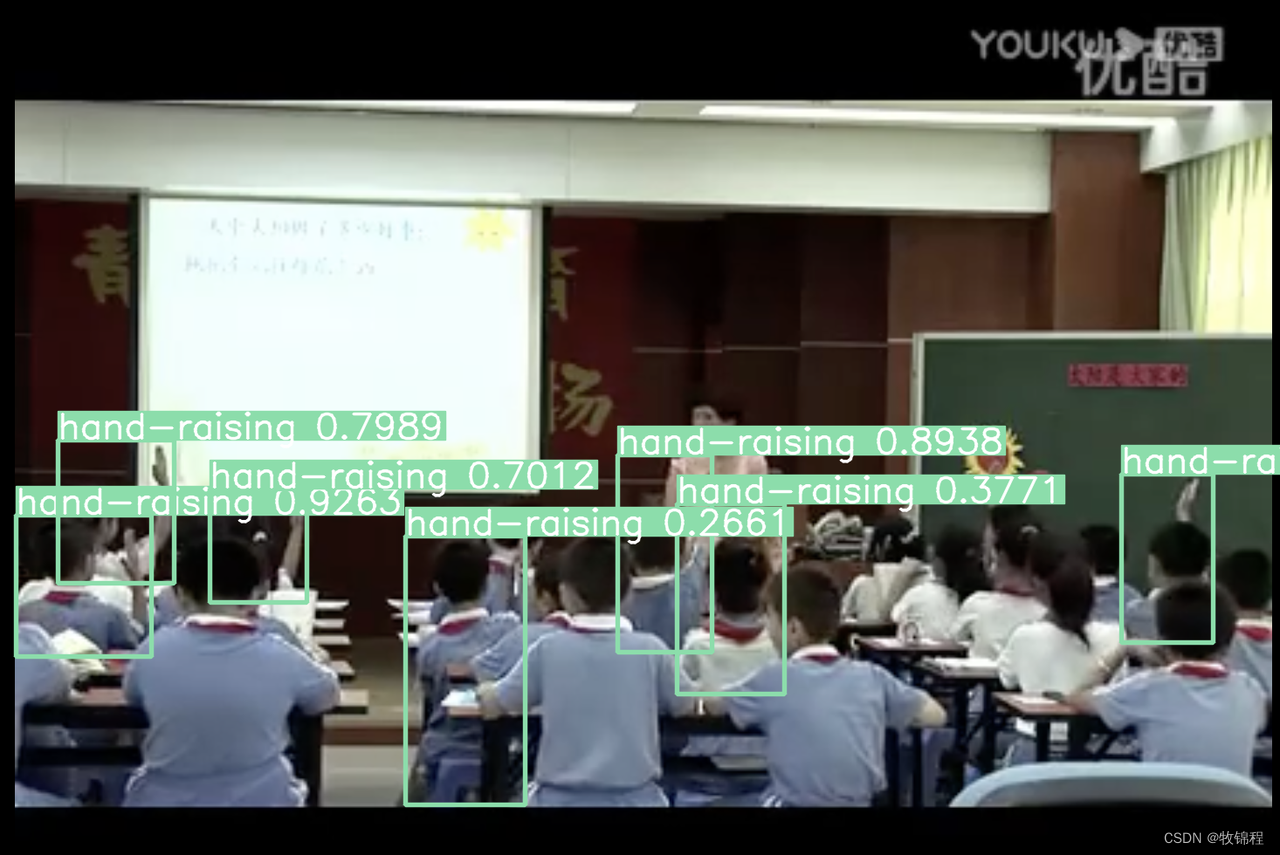
在现代教育环境中,学生上课行为的监测对于提升教学质量和学生学习效率具有重要意义。然而,传统的人工观察方法不仅效率低下,而且难以保证客观性和准确性。为了解决这一问题,我们启动了这个项目,目的是利用YOLOV8这一先进的深度学习技术,开发一个自动化的学生上课行为检测系统。
蔬菜水果的种类繁多,是人们日常生活中不可或缺的一部分。然而,在蔬菜水果的生产、销售和储存过程中,往往面临着诸多挑战,如品质检测、分类等问题。为了提高蔬菜水果行业的生产效率和产品质量,我们提出了基于深度学习技术的蔬菜水果检测系统。基于此项目,设计一个使用Pyqt5库来搭建页面展示系统。本系统支持的功能包括训练模型的导入、初始化;置信度与IOU阈值的调节、图像上传、检测、可视化结果展示、结果导出与结束

支持图片、图片批量、视频及摄像头进行检测,同时摄像头可支持内置摄像头和外设摄像头;可对检测结果 进行单独分析,并且显示单个检测物体的坐标、置信度等;界面可实时显示目标位置检测结果检测时间置信度检测结果回滚等信息;支持图片视频及摄像头的结果保存,将检测结果保持为excel文件;

Market-1501 数据集在清华大学校园中采集,夏天拍摄,在 2015 年构建并公开。它包括由6个摄像头(其中5个高清摄像头和1个低清摄像头)拍摄到的 1501 个行人、32668 个检测到的行人矩形框。每个行人至少由2个摄像头捕获到,并且在一个摄像头中可能具有多张图像。训练集有 751 人,包含 12,936 张图像,平均每个人有 17.2 张训练数据;测试集有 750 人,包含 19,73
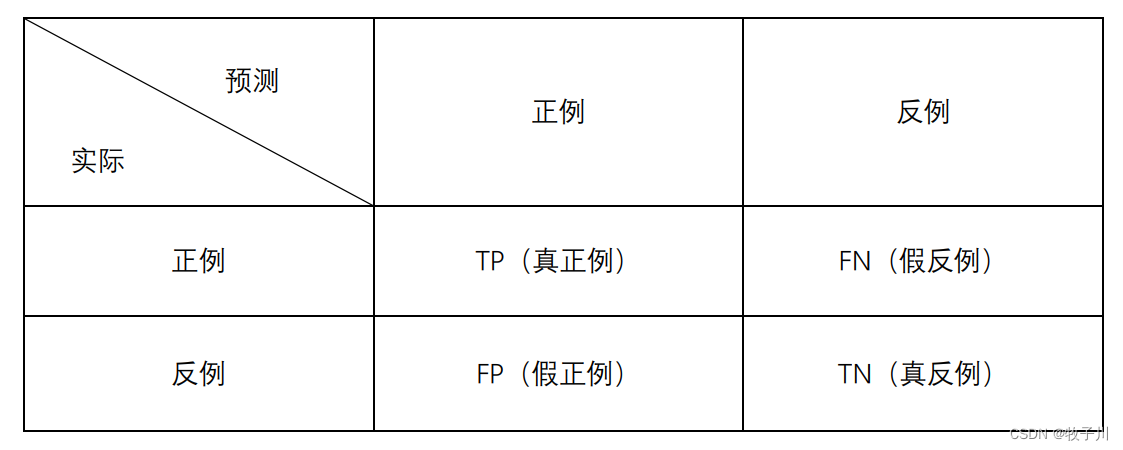
我们在训练模型的过程中,需要用未知的数据集(为被训练过的)送入训练好的模型进行验证,来检测该模型是否适用于该项目。哪该如何来进行判断呢?这个就需要评价指标了。模型的评价指标有很多,比如:精确率(查准率)、F1-Score、召回率(查全率)、准确率、P-R曲线、ROC曲线等。我们这里就主要介绍精确率(查准率)、F1-Score、召回率(查全率)、准确率。...