




- @qq_45685327
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
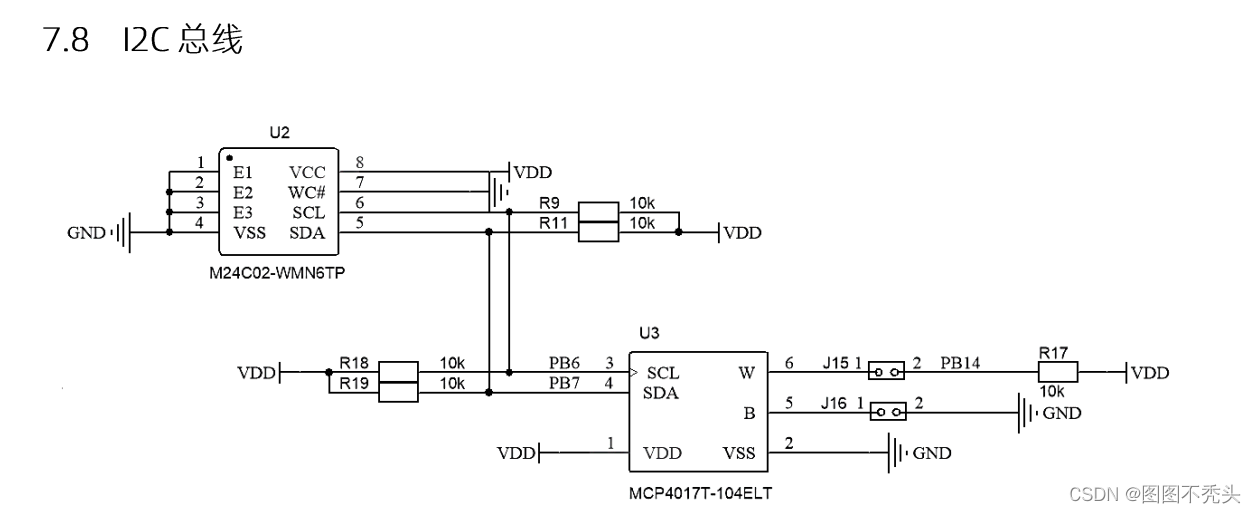
工程文件链接,不需要积分即可下载1.在上一篇iic工程文件基础上进行修改(1).添加mcp4017相关库函数代码,直接添加在iic.c文件内,并在bsp_iic.h文件内对新增加的库函数进行声明void iic_mcp4017_write(uint8_t value){I2CStart();I2CSendByte(0x5e);I2CWaitAck();I2CSendByte(value);I2CW
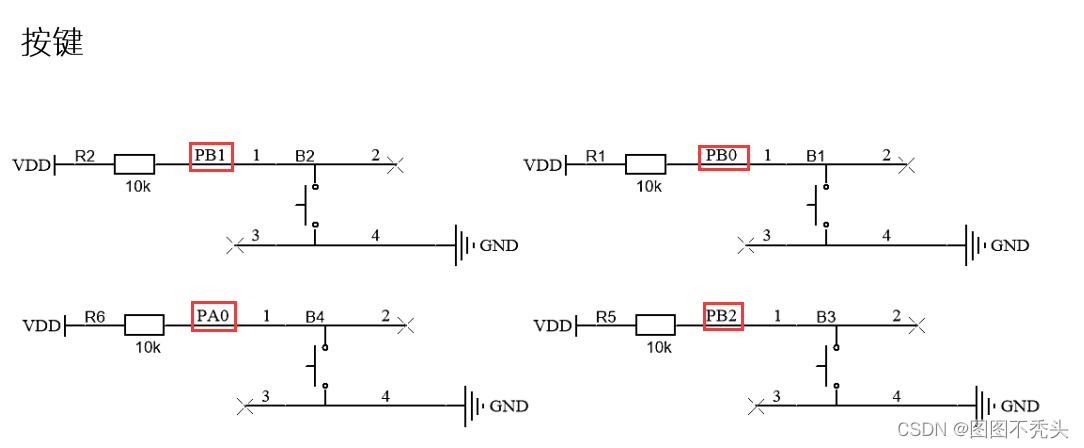
蓝桥杯嵌入式 按键控制工程代码解析1.在上一一个STM32CubeMX工程文件里面进行修改(1).添加设置PB0-PB2、PA0为输入模式(2).生成keil工程文件2.分别添加bsp文件夹到Scr、Inc文件夹(文章最后会附上工程文件(无需积分会员直接下载))3.添加.c .h 文件到工程文件...
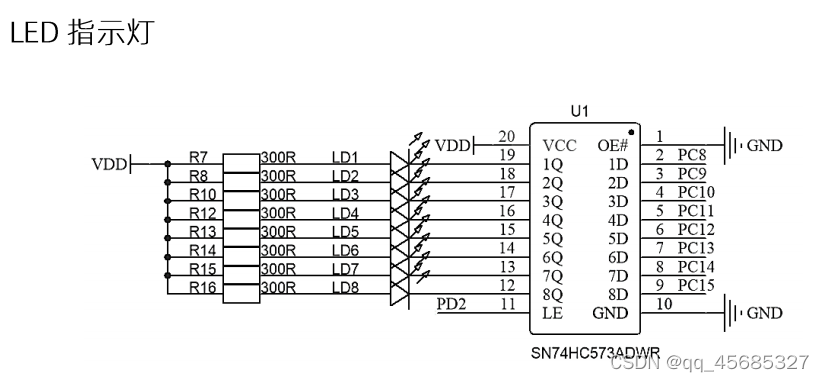
1.分析LED原理图
蓝桥杯嵌入式 按键控制工程代码解析1.在上一一个STM32CubeMX工程文件里面进行修改(1).添加设置PB0-PB2、PA0为输入模式(2).生成keil工程文件2.分别添加bsp文件夹到Scr、Inc文件夹(文章最后会附上工程文件(无需积分会员直接下载))3.添加.c .h 文件到工程文件...
工程文件链接,不需要积分即可下载1.在上一篇iic工程文件基础上进行修改(1).添加mcp4017相关库函数代码,直接添加在iic.c文件内,并在bsp_iic.h文件内对新增加的库函数进行声明void iic_mcp4017_write(uint8_t value){I2CStart();I2CSendByte(0x5e);I2CWaitAck();I2CSendByte(value);I2CW
该文件是move_base 在全局路径规划与本地路径规划时调用的通用参数,包括:机器人的尺寸、距离障碍物的安全距离、传感器信息等。(为了省事,我把Gazebo仿真环境的launch文件也集成在这里了,没有按照教程说的单独启动,目前没有出现问题)基本的局部规划器参数配置,这个配置文件设定了机器人的最大和最小速度限制值,也设定了加速度的阈值。运行集大成的launch文件,在rviz里面添加需要的组件,

工程文件链接,不需要积分即可下载1.在上一篇iic工程文件基础上进行修改(1).添加mcp4017相关库函数代码,直接添加在iic.c文件内,并在bsp_iic.h文件内对新增加的库函数进行声明void iic_mcp4017_write(uint8_t value){I2CStart();I2CSendByte(0x5e);I2CWaitAck();I2CSendByte(value);I2CW
该移动机器人可以发布里程计消息机器人需要发布雷达消息(该消息可以通过水平固定安装的雷达发布,或者也可以将深度相机消息转换成雷达消息)关于里程计与雷达数据,仿真环境中可以正常获取的,不再赘述,栅格地图如案例所示。

同一套 ROS 程序,如何部署在不同的机器人系统上,比如:开发阶段为了提高效率是在仿真平台上测试的,部署时又有不同的实体机器人平台,不同平台的实现是有差异的,如何保证 ROS 程序的可移植性?ROS 内置的解决方式是 ros_control。是一组软件包,它包含了控制器接口,控制器管理器,传输和硬件接口。
map_server功能包中提供了两个节点: map_saver 和 map_server,前者用于将栅格地图保存到磁盘,后者读取磁盘的栅格地图并以服务的方式提供出去。sudo apt install ros--map-server。
