




- @qq_44116998
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
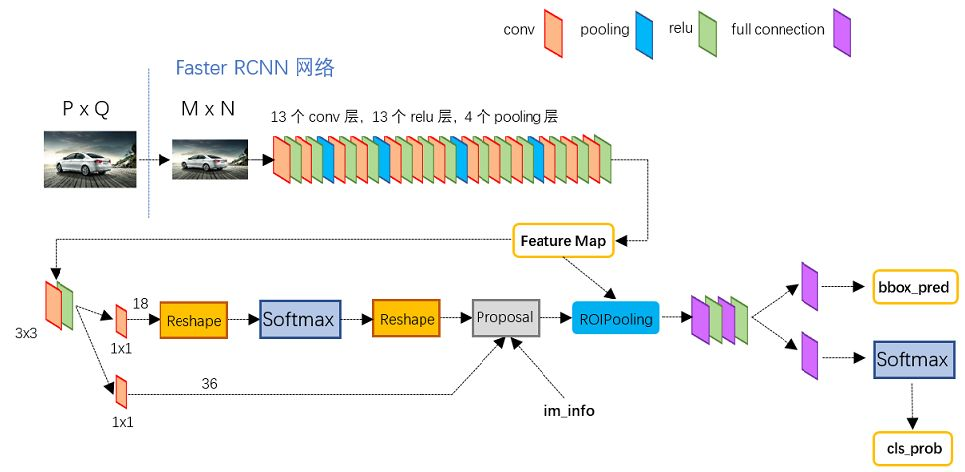
滑动窗口,每一个位置得到一个256维向量(不唯一,此处backbone输出的深度为256),然后经过全连接层,得到分类的2k个分数(对应右侧指向的k个anchor,每个anchor两个参数描述前景概率与后景概率),与位置框回归的4k个参数。在上图中,从feature map层来看,有两个指向上层的箭头,其中左侧指向Region Proposal Network的即为RPN结构,右侧指向Roi po
滑动窗口,每一个位置得到一个256维向量(不唯一,此处backbone输出的深度为256),然后经过全连接层,得到分类的2k个分数(对应右侧指向的k个anchor,每个anchor两个参数描述前景概率与后景概率),与位置框回归的4k个参数。在上图中,从feature map层来看,有两个指向上层的箭头,其中左侧指向Region Proposal Network的即为RPN结构,右侧指向Roi po

描述给你一串路径,譬如:a\b\ca\d\eb\cstd你把这些路径中蕴含的目录结构给画出来,子目录直接列在父目录下面,并比父目录的首字符向右缩两个空格,就像这样:abcdebcstd注:同一级的需要按字母顺序排列,不能乱。输入描述:每个测试案例第一行为一个正整数n(n<=10)表示有n个路径,当n为0时,测试结束,接下来有n行,每行有一个字串表示一个路径,长度小于50。输出描述:输出目录结
学习资料参考:张平.《OpenCV算法精解:基于Python与C++》.[Z].北京.电子工业出版社.2017.方程法由仿射矩阵可知,该矩阵中有6个未知数,所以一共需要六个方程来解6个未知数.(点击访问仿射矩阵)那么也就是需要三个坐标转换前与转换后的相应坐标值才能构造出仿射矩阵。库函数提供了如何求解的办法,我们只需提供三个坐标点(前后共6个)即可。示例#include<opencv2/cor
学习资料参考:张平.《OpenCV算法精解:基于Python与C++》.[Z].北京.电子工业出版社.2017.基础概念二维离散卷积是在两个矩阵的基础上的一种计算方式,如下所示:I=(1234)I=\begin{pmatrix} 1 & 2 \\ 3 & 4 \\ \end{pmatrix}I=(1324),K=(−1−221)K=\begin{pmatrix} -1 &
一、灰度图灰度图就是单通道图像,而单通道图是指维度数为2的图像。而灰度就是没有色彩,RGB色彩分量全部相等(可将这点与下文的RGB图进行对比)。那么灰度图的每个像素点就只有一个值表示颜色,像素值的范围就是[0~255]。如使用RGB表示灰度为100的图像,即RGB(100,100,100).简而言之,灰度图就是黑白图。(图片来源于:百度图片-点击访问)二、RGB图图像通道在RGB色彩模式下就是指在

双目视差是指由于我们人眼间的距离(大约6.5厘米)不同,左右眼所观察到的同一物体的图像会略有差异。这种差异就是视差,它是人眼获取深度信息的关键。简单来说,双目视差的产生就是左右眼从不同角度观察场景,获得的视网膜图像有所不同。双目视差对于人类的深度感知至关重要。我们的眼睛和大脑通过对这两个视角图像的融合,能够判断出物体的空间深度,即哪些物体离我们近,哪些物体远。这种视觉处理机制使得我们能够在三维空间

点云是由多个点(每个点通常包含 x、y 和 z 坐标)构成的数据集,表示物体表面或场景的三维结构。在计算机视觉中,点云是由深度图或 LiDAR 等传感器生成的。点云提供了物体的几何形状,但通常没有连接点的三角面片信息,因此不像网格那样具有表面。
在大一上学期,我们学了冒泡排序,选择排序,插入排序等等,而今天主要详解一下链表的冒泡排序的问题。(边看代码,边讲解)首先,回顾一下,什么叫做冒泡排序。冒泡排序是一种时间复杂度在n的平方下的排序;每次循环都是比较前后两项,要么以从小到大排序,要么从大到小排序。第一种:struct node *bubblesort(struct node *headptr)//接受头指针,链表的开端,首节点不...