写文章




- @qq_41102371
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
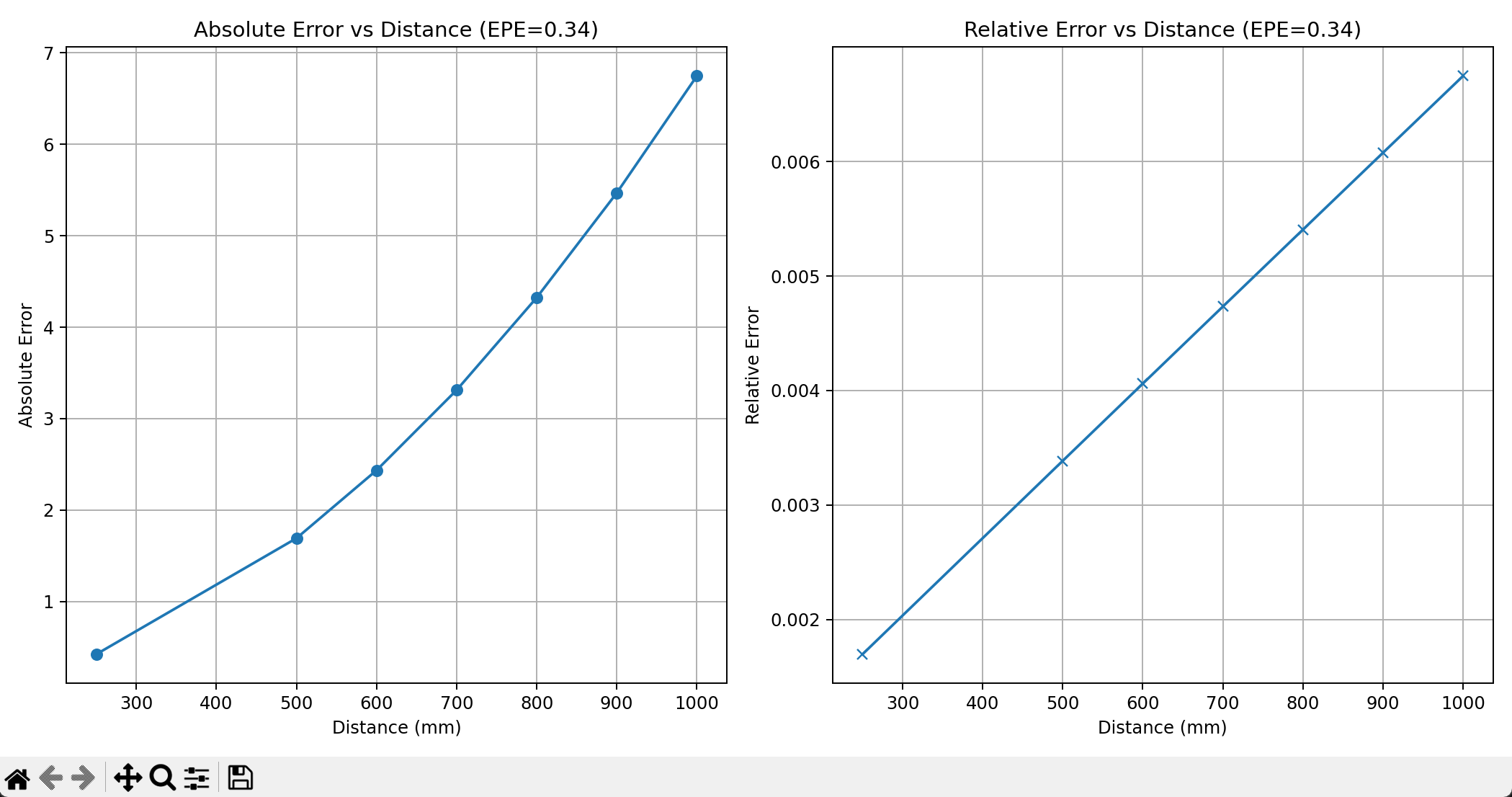
average per-pixel disparity error: EPE及不同距离值下的误差曲线
介绍epe的概念,作用;由epe推导出的不同距离下的物理误差曲线**一句话简单理解:epe是用于深度估计、以像素为单位的误差度量方式**
3d bounding box投影到2d
3D边界框投影到2D图像的实现(Python)
Eigen计算三维向量的夹角以及空间变换矩阵
使用Eigen计算两个向量之间的刚体变换;当两个向量是点云平面法向量时,也就知道了这两个平面点云之间的刚体变换
四元数、罗德里格斯公式、欧拉角、旋转矩阵推导和资料
四元数、罗德里格斯公式、欧拉角、旋转矩阵推导和资料
CGAL(5.6.1)安装、使用教程
本文是CGAL(5.6.1)在Windows下的安装、使用教程;
点云分割-pcl区域生长算法
pcl的区域生长算法的使用和原理
如何学习、上手点云算法(二):点云处理相关开源算法库、软件、工具
一些用于点云处理的开源算法库、软件介绍,主要包含:CloudCompare, MeshLab, PCL, Open3D, VTK, CGAL等
VsCode配置PCL、Open3D自动补全
在VsCode上开发PCL、Open3D相关代码,代码自动补全
PCL1.14.0安装、使用教程
本文是PCL1.14.0在Windows下的安装、使用教程
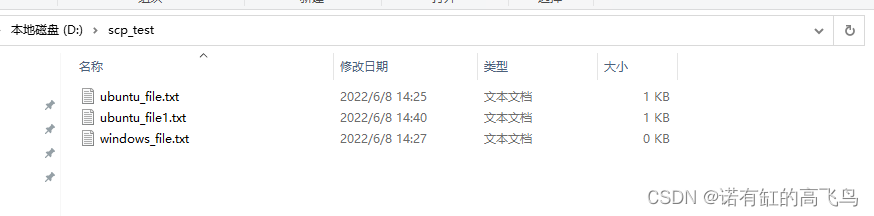
ubuntu虚拟机与windows主机文件传输(命令行)
使用scp,在ubuntu虚拟机与windows主机上互传文件