




- @qq_40301351
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
文章摘要: 本文提出了一种基于深度相机点云的舱口矩形检测算法,采用射线投影与连通域分析方法。流程分为两步:1) 甲板平面检测与高度图生成,通过RANSAC平面分割、正交投影和高度图二值化获得俯视图;2) 舱口定位,结合形态学处理、Canny边缘检测和Hough变换提取垂直线段,通过射线投影追踪与绿线/白区的交点,最终在连通域分析中通过收缩贴合确定精确矩形边界。算法利用多坐标系转换实现从低分辨率检测
🎵 发现了一款超实用的免费在线音视频转换工具AudioFlow!支持30+种格式转换,包括MP4转MP3、FLAC转MP3等常见需求。操作简单三步完成,无需注册即可使用,转换速度快(约10秒),文件自动1小时后删除保障隐私。界面清爽无广告,游客每天3次免费转换机会(注册后5次)。适合音乐爱好者、视频创作者、学生等各类人群使用。开源项目技术可靠,是日常音视频处理的便捷选择!

本文介绍了一种基于多线激光雷达的在线建图与定位系统Lightning-LM。该系统采用激光-惯性紧耦合前端结合回环检测与位姿图优化的经典框架,支持Velodyne等主流雷达,提供SLAM和定位两种模式。文章详细说明了系统功能、参数配置、快速使用方法及常见问题排查,特别针对Velodyne雷达提供了具体配置建议。该系统具有实时性高、漂移低的特点,工程集成友好,适合实际应用场景。文末注明项目基于高翔的
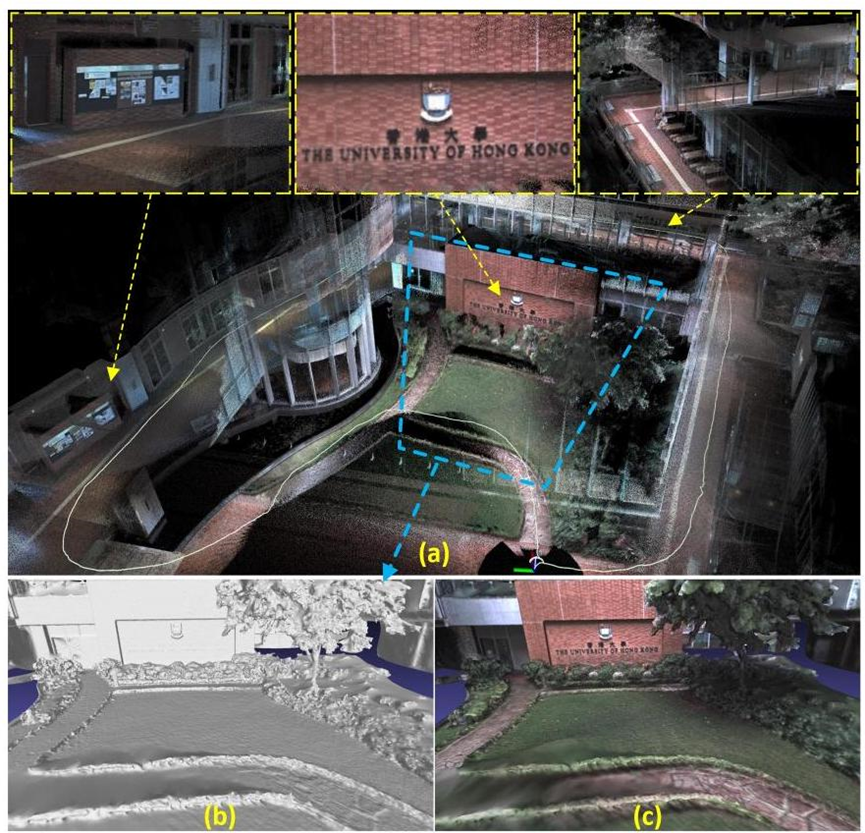
我们系统的概述如图2所示,我们提出的框架包含两个子系统:LIO子系统(上部分)和VIO子系统(下部分)。LIO子系统构建了一个全局地图的几何结构,它注册输入的激光雷达扫描,并通过最小化点到平面的残差来估计系统的状态。VIO子系统构建地图的纹理,它使用输入图像为每个点渲染RGB颜色,并通过最小化帧与帧之间的PnP重投影误差和帧与地图的光度误差来更新系统状态。图2:我们提出的系统概述。
本文介绍了如何打造一个高度集成的SLAM仿真环境,通过Gazebo、ROS Noetic和Scout UGV机器人模型实现一键启动的激光雷达-IMU SLAM系统。项目包含三大核心组件:Gazebo仿真环境、lightning-lm SLAM算法和RViz可视化工具。重点展示了通过bash脚本实现多节点分标签启动的解决方案,并优化了键盘控制方式,将默认按键改为更直观的箭头键控制。该方案将复杂的SL
【三维点云数据处理】ISS特征点提取算法【三维点云数据处理】SHOT三维特征描述子【三维点云数据处理】RANSAC实现点云粗配准利用ISS3d+CSHOT+RANSAC+ICP来实现点云的配准。前面已经将ISS3D、SHOT三位特征描述子、RANSAC粗配准都进行了讲解,接下来将这些结合起来实现点云的粗配准,最后使用ICP进行优化,最终实现点云的配准。一、算法原理首先利用ISS3D算法找到点云P和

看似编译通过,但是没有生成可执行文件。例:你可以通过以下命令检查。可执行文件被正确生成并位于。

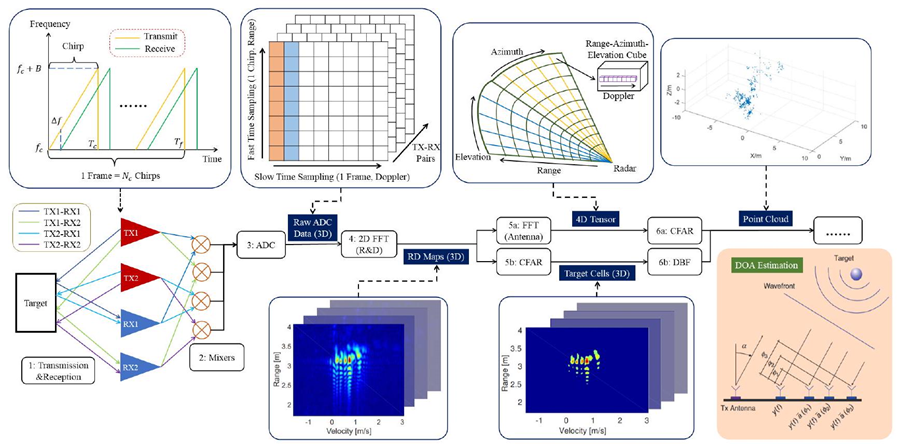
4D毫米波(mmWave)雷达能够测量目标的距离、方位、俯仰和速度,因此在自动驾驶领域引起了相当大的关注。这归功于其在极端环境中的强大鲁棒性以及出色的速度和俯仰测量能力。然而,尽管与其感知理论和应用相关的研究迅速发展,但关于4D毫米波雷达的综述仍然明显缺乏。为填补这一空白,促进该领域未来的研究,本文提出了关于4D毫米波雷达在自动驾驶中的综合综述。首先对4D毫米波雷达的理论背景和进展进行综述,包括信
我们系统的概述如图2所示,我们提出的框架包含两个子系统:LIO子系统(上部分)和VIO子系统(下部分)。LIO子系统构建了一个全局地图的几何结构,它注册输入的激光雷达扫描,并通过最小化点到平面的残差来估计系统的状态。VIO子系统构建地图的纹理,它使用输入图像为每个点渲染RGB颜色,并通过最小化帧与帧之间的PnP重投影误差和帧与地图的光度误差来更新系统状态。图2:我们提出的系统概述。