




- @qq_37394634
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
目录<span style="color:#333333"><span style="background-color:#f5f5f5">1.AIML简介2.AIML的安装3.AIML的使用4.AIML语法简介5.添加多个AIML文件6.加速AIML的载入7.会话和谓词</span></span>AIML简介AIML,全名为A...

个人博客:http://www.chenjianqu.com/原文链接:http://www.chenjianqu.com/show-42.html最近开始复习考研了,所以博客更新频率要降下来了,只能是白天复习,晚上抽空写写代码。宿舍里有一块树莓派3B+,买了两年,一直没怎么用过,突然想玩玩,发现用来做智能家居还不错。智能家居最重要的功能是语音对话,我这篇博客就是分享一下怎么用...
个人博客:http://www.chenjianqu.com/原文链接:http://www.chenjianqu.com/show-54.html生成式对抗网络(GAN, Generative Adversarial Networks )是一种深度学习模型,是近年来复杂分布上无监督学习最具前景的方法之一。论文《Generative Adversarial Nets》首次提出GAN...
个人博客:http://www.chenjianqu.com/原文链接:http://www.chenjianqu.com/show-48.html语言模型语言模型是自然语言处理的一大利器,是NLP领域一个基本却又重要的任务。它的主要功能就是计算一个词语序列构成一个句子的概率,或者说计算一个词语序列的联合概率,这可以用来判断一句话出现的概率高不高,符不符合我们的表达...
个人博客:http://www.chenjianqu.com/原文链接:http://www.chenjianqu.com/show-54.html生成式对抗网络(GAN, Generative Adversarial Networks )是一种深度学习模型,是近年来复杂分布上无监督学习最具前景的方法之一。论文《Generative Adversarial Nets》首次提出GAN...
个人博客:http://www.chenjianqu.com/原文链接:http://www.chenjianqu.com/show-53.html迁移学习迁移学习(Transfer Learning)是一种机器学习方法,就是把为任务 A 开发的模型作为初始点,重新使用在为任务 B 开发模型的过程中。迁移学习是通过从已学习的相关任务中转移知识来改进学习的新任务,虽然...
个人博客:http://www.chenjianqu.com/原文链接:http://www.chenjianqu.com/show-50.html其实以前也学过一点tensorflow,但是因为后来一直没怎么用,所以也忘的差不多。但是做算法的tf还是要会的,因此本文通过经典问题mnist手写数据集的分类来复习一下tensorflow的基本用法。tensorflow...
个人博客:http://www.chenjianqu.com/原文链接:http://www.chenjianqu.com/show-53.html迁移学习迁移学习(Transfer Learning)是一种机器学习方法,就是把为任务 A 开发的模型作为初始点,重新使用在为任务 B 开发模型的过程中。迁移学习是通过从已学习的相关任务中转移知识来改进学习的新任务,虽然...
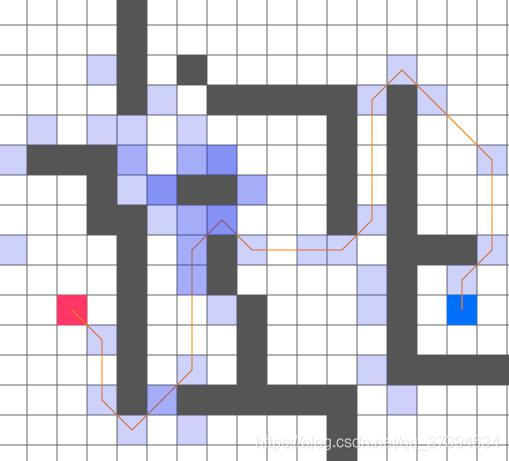
ps:本文的相关图片来自与深蓝学院的课件。图搜索的基本概念Workspace:现实空间。配置空间:机器人表示为一个点,障碍物表示为无法达到的点。下面是不同的图的形式:抽象图、无向图、带权重的图、有向图。对于一个搜索问题,都对应一个状态空间图,图中节点之间的连接性由有向或无向边表示。如下图左的栅格地图就是以每个栅格为节点而构建一个搜索图,下图右的采样地图需要人为构建一个图:对图进行搜索可以得到一个搜
个人博客:http://www.chenjianqu.com/原文链接:http://www.chenjianqu.com/show-38.html文本情感分析文本情感分析:又称意见挖掘、倾向性分析等。简单而言,是对带有情感色彩的主观性文本进行分析、处理、归纳和推理的过程。互联网(如博客和论坛以及社会服务网络如大众点评)上产生了大量的用户参与的、对于诸如人物、事件、产品等有价值...