- @qq_36130719
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在计算机视觉三大核心任务(小目标检测、图像分割、图像分类)中,特征提取的精准度直接决定模型性能上限。YOLO26作为单阶段模型的最新迭代版本,凭借端到端推理、高效特征融合的优势,在多任务场景中展现出良好的适配性,但原生模型采用的传统注意力机制(如SE、CBAM)存在明显短板——空间注意力与通道注意力相互独立,无法实现协同联动,导致模型对细粒度特征、微弱特征的捕捉能力不足,在小目标检测(特征微弱)、
在医学图像分割和小目标检测两大场景中,YOLO26原生模型的短板十分突出,这也是我们提出LGLBlock改进的核心原因。"""大核局部-全局-局部模块(LGLBlock),ACM 2025创新模块,即插即用,适配医学分割与小目标检测"""# 1. 输入通道对齐self.cv1 = Conv(c1, c2, 1) # 通道对齐,降低计算复杂度# 2. 局部特征提取分支(Local Branch):双
模型测试阶段,YOLO-v4-Tiny、YOLO-v4-MobileNet-v3和YOLO-v4L-SA 在VOC2012数据集的检测的准确率、召回率和精度mAP值结果如下表4-3所示。骨干网络部分由1个卷积层和8个SA-bneck结构和7个bneck,本章设计的 SA-bneck结构为对MobileNet-v3中bneck结构的改进,保留MobileNet-v3中使 用1个3×3卷积和1个1×1
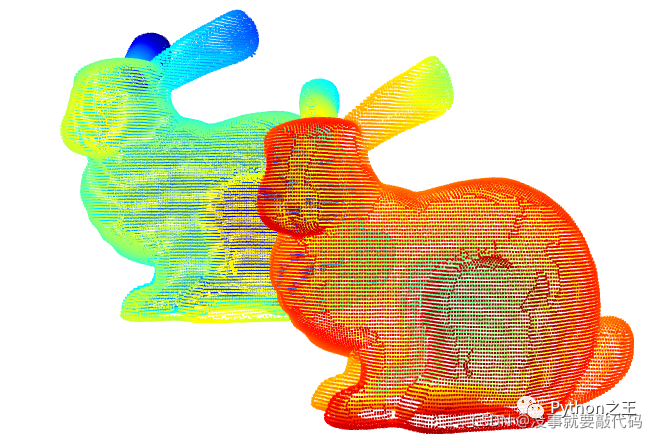
Open3D是一个开源库,支持快速开发处理3D数据的软件。Open3D后端是用C++实现的,经过高度优化并通过Python的前端接口公开。Open3D提供了三种数据结构:点云(point cloud)、网格(mesh)和RGB-D图像。对于每个表示,open3D都实现了一整套基本处理算法,如I/O、采样、可视化和数据转换。此外,还包括一些常用的算法,如法线估计、ICP配准等。模块功能Geometr
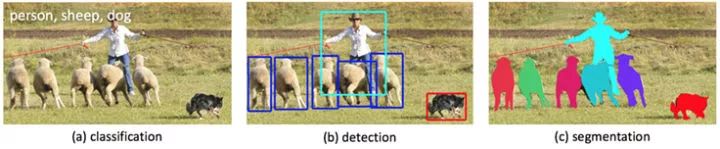
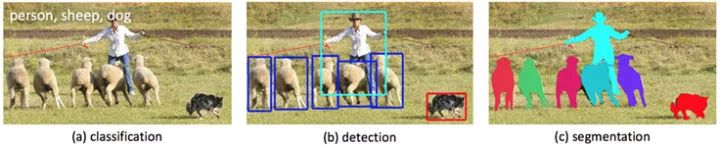
如何理解一张图片?根据后续任务的需要,有三个主要的层次。图像理解的三个层次,即是将图像结构化为某一类别的信息,用事先确定好的类别(string)或实例ID来描述图片。这一任务是最简单、最基础的图像理解任务,也是深度学习模型最先取得突破和实现大规模应用的任务。其中,ImageNet是最权威的评测集,每年的ILSVRC催生了大量的优秀深度网络结构,为其他任务提供了基础。在应用领域,人脸、场景的识别等都
伴随互联网技术蓬勃发展,人工智能愈发强大,对计算机视觉领域的研究也开创了新 的时代,计算机可以解决越来越多的问题,例如对现实中的图像进行目标分类、目标检测 和跟踪等[1]。目标检测是我国计算机视觉中图像处理应用研究的热点方向之一,其根本任 务是通过提取输入图像的目标特征,分析得到目标所属类别和目标所在的位置,并用框标 出位置,同时显示所属类别及得分[2-3]。因此对图像进行目标检测方法的研究,对于

如何从图像中解析出可供计算机理解的信息,是机器视觉的中心问题。深度学习模型由于其强大的表示能力,加之数据量的积累和计算力的进步,成为机器视觉的热点研究方向。那么,如何理解一张图片?根据后续任务的需要,有三个主要的层次。图像理解的三个层次,即是将图像结构化为某一类别的信息,用事先确定好的类别(string)或实例ID来描述图片。这一任务是最简单、最基础的图像理解任务,也是深度学习模型最先取得突破和实
XGBoost支持在训练过程中,自定义损失函数和评估准则,其中损失函数的定义需要返回损失函数一阶和二阶导数的计算方法,评估准则部分需要对数据的label和预估值进行计算。其中损失函数用于训练过程中的树结构学习,而评估准则很多时候是用在验证集上进行效果评估。print('使用自定义损失函数进行交叉验证')# 自定义损失函数,需要提供损失函数的一阶导和二阶导# 自定义评估准则,评估预估值和标准答案之间
Qt是一个跨平台的C++应用程序开发框架。它由Qt Company(前身为Nokia)开发,用于开发图形用户界面、嵌入式系统、以及其他应用程序,支持Windows、macOS、Linux、Android和iOS等多个操作系统。Qt框架提供了丰富的功能和工具,包括图形用户界面设计、数据库操作、网络编程、文件处理等。它还包括了一个广泛的类库,开发者可以使用这些类来加速应用程序的开发过程。Qt还具有良好

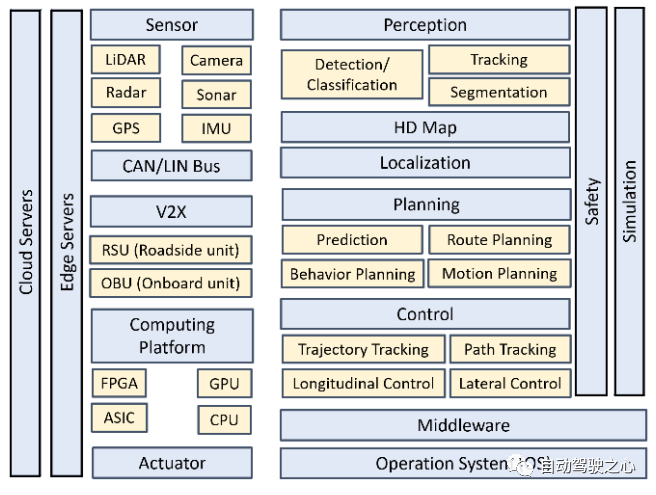
10多年来,自动驾驶一直是一个热门话题。2004年和2005年,DARPA举办了乡村无人车大赛。2007年,DARPA还举办了城市环境中的自动驾驶大赛。之后,斯坦福大学的S.Thrun教授(2005年冠军和2007年亚军)加入谷歌,建立了Google X和自动驾驶团队。最近有三篇关于自动驾驶的调查报告[3,9,14]。自动驾驶作为机器学习和计算机视觉等人工智能领域最具挑战性的应用之一,已经被证明是