




- @qq_35759272
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
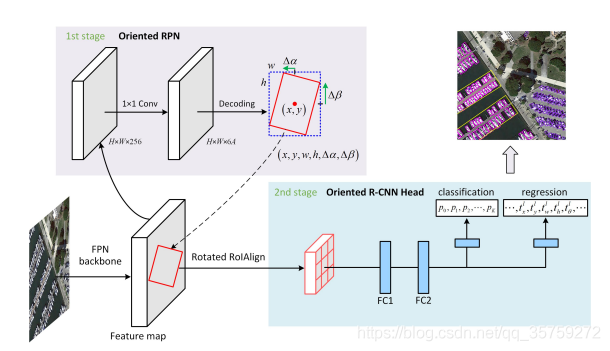
本文提出一种通用的两阶段旋转目标检测器,具有良好的准确性和效率,表现SOTA!性能优于Mask OBB、SCRDet等网络,代码现已开源!作者单位:西北工业大学
nuScenes、DDAD、KITTI等
基于语义和几何约束的方法
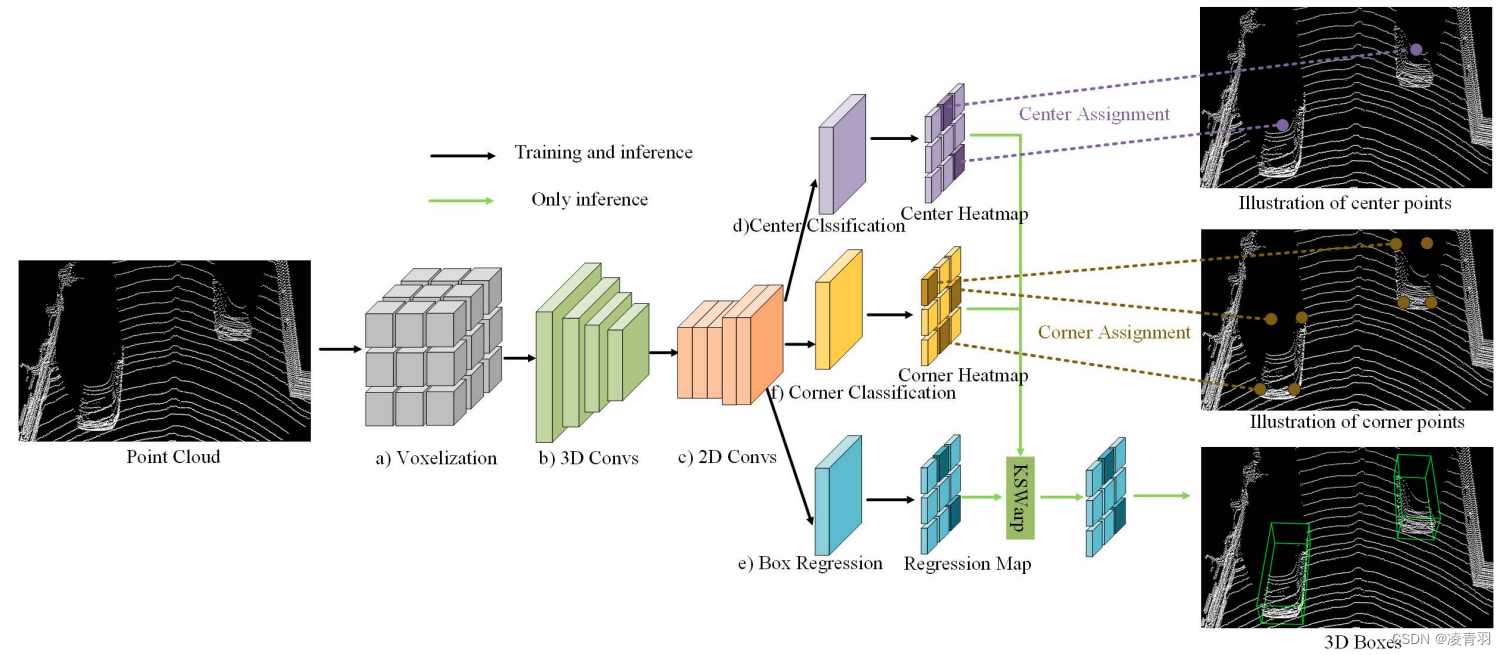
近期开源的 | 激光雷达点云的3D目标检测 | 论文1. HVPR——《Hybrid Voxel-Point Representation for Single-stage 3D Object Detection》2021.42. SE-SSD——《Self-Ensembling Single-Stage Object Detector From Point Cloud》 2021.41. HVP
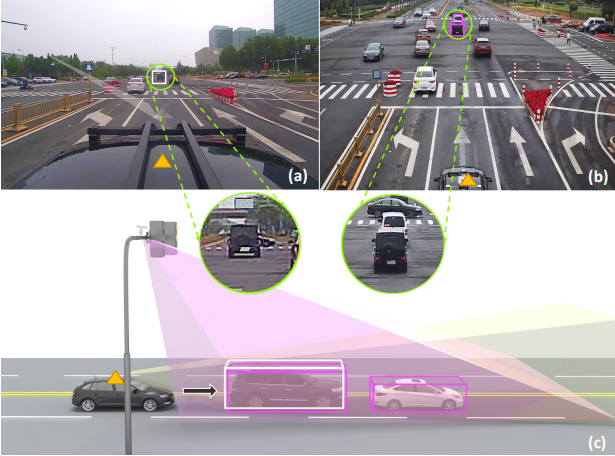
1. Rope3D目标检测路侧单目3D检测与传统自动驾驶3D检测任务相比,本任务需要解决3个难点。首先,由于路侧相机具有不同的配置,例如相机内参数、俯仰角、安装高度,因此存在歧义性,这在很大程度上增加了单目3D检测任务的难度。 其次,由于路侧相机安装在杆子上,而不在车顶的正上方,因此相机光轴与地面平行的假设不再成立,无法直接应用具有此先验的单目3D 检测方法。 第三,由于路侧视角下的感知范围更大,
【代码】深度学习常用代码(Pytorch)
计算机视觉实习生面经1. 百度(计算机视觉实习生,ACG,自动驾驶)——2021/05一面二面2. 地平线(感知算法实习生,北京)——2021/083. 小米(计算机视觉实习生,AI Lab,目标检测--小米手机的辅助变焦)——2021/094. 旷视(计算机视觉实习生,极智感知组,做生物识别活体检测相关)——2021/095. 旷视(计算机视觉实习生,face组,做人脸视差图到深度图深度模型)—
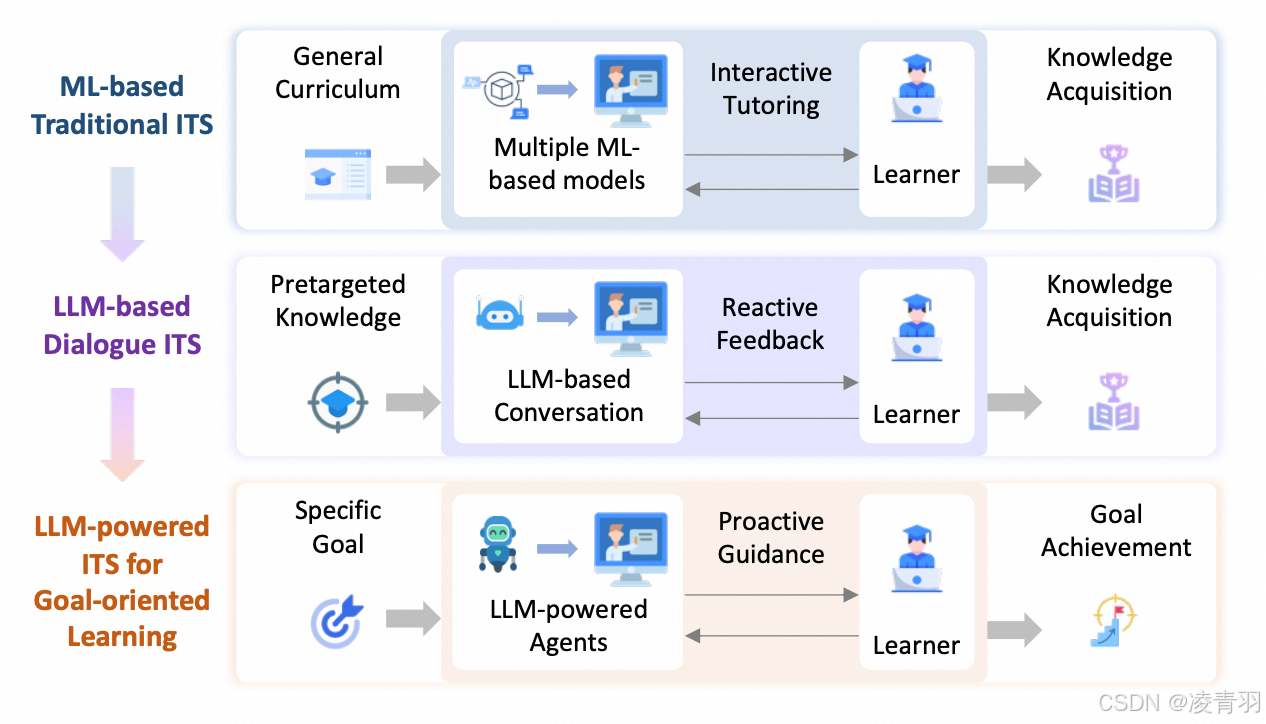
概述:GenMentor是一个创新的基于大型语言模型的多智能体框架,旨在通过准确的技能差距识别、自适应学习者画像和量身定制的内容传递,提升智能辅导系统,提供个性化、目标导向的学习体验。
【代码】深度学习常用代码(Pytorch)
第6章 人脸检测和人脸识别6.1 补充知识6.2BUG调试6.2.1 ModuleNotFoundError: No module named 'align.detect_face'解决办法:参考链接6.2.2 ValueError: Object arrays cannot be loaded when allow_pickle=False链接6.2.3 ImportError cannot i