




- @qianbo042311
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
集群机器人基本概念用一组机器人来解决完成一项复杂的任务,这种设计来自于群居的生物物种,而人类正是这种类别一群蚂蚁比一只蚂蚁能完成的任务更多,同理,在于社区内的一群机器人能完成的任务大大超越个人的能力或者单机器人能力,下面我们分析为何需要该集群机器人。团队领导作为团队的领导,去集中力量和分配任务完成工作,即使当中有单个机器人出现问题,也可以继续重新分配完成剩余任务。连接使用1 为了效率2 为了少使用
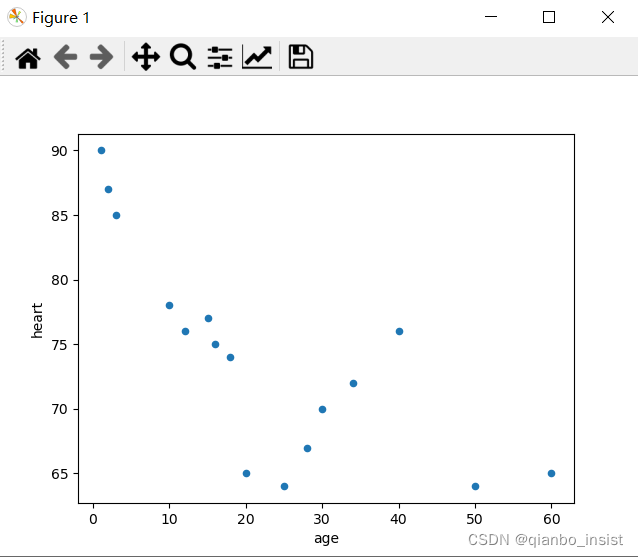
1、线性回归线性回归是利用数理统计中回归分析,使用该方法可以确定两种或两种以上变量间相互依赖的定量关系的一种统计分析方法,运用十分广泛。其表达形式为y = w’x+e,e为误差服从均值为0的正态分布。如何利用线性回归来统计和预测数据?我们先使用最简单得线性模型来预测数据,慢慢走到更深得层次。2、数据量数据量得大小决定了模型是否精确,训练数据不足将会使得机器学习得成果很低,因此我们才需要“大数据”。
鱼眼摄像头变换视角,AI 必备

大小端互转

1、线性回归线性回归是利用数理统计中回归分析,使用该方法可以确定两种或两种以上变量间相互依赖的定量关系的一种统计分析方法,运用十分广泛。其表达形式为y = w’x+e,e为误差服从均值为0的正态分布。如何利用线性回归来统计和预测数据?我们先使用最简单得线性模型来预测数据,慢慢走到更深得层次。2、数据量数据量得大小决定了模型是否精确,训练数据不足将会使得机器学习得成果很低,因此我们才需要“大数据”。
h264 rtp接收和发送程序
gitblitjava版本gitblit安装时,有一个java的版本问题,当启动有问题时,往下降低一个版本。gitblit 服务启动在windows上启动服务,安装好服务以后,点击开始时会报错,无法启动服务除了64位和32位版本匹配问题,还有一个问题是因为jvm.dll 找不到的问题。启动gitblitw ,去掉 Use default,在java virtual machine 中选择 找到安装
文章摘要: 本文描述了一个C++与Python协同的视频处理框架设计。系统采用C++进行视频解码(使用FFmpeg库),解码后的帧数据通过共享内存传递给Python进行测试和处理。主类c_SDLDrawer负责视频渲染显示,包含SDL窗口管理、帧缓存队列(v_pframes)和OpenCV图像处理功能。框架支持BGR/YUV格式渲染、文本叠加(中英文混合显示)、图像裁剪等功能。通过环形缓冲区和线程
鱼眼摄像头变换视角,AI 必备
这是系列一1\webrtc 调用摄像头1.1、api使用API : getusermedianavigator.mediaDevices.getUserMedia(Constraints)Constraints 是限制流参数,比如画面宽高。1.2、加入adapter-laster.js为了保证摄像头在浏览器中兼容API而使用<script src="https://webrtc.github