




- @maxhn0
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文介绍了如何利用相机标定得到的参数K和D对畸变图像进行矫正,生成无畸变图像。主要内容包括:1)详细解析了矫正流程,即从畸变像素到归一化坐标、去畸变、再投影到理想像素的完整步骤;2)对比了前向映射和反向映射两种方法,说明工程实践中多采用反向映射结合插值的原因;3)介绍了预计算查找表(LUT)的优化方法,通过提前存储映射关系大幅提升处理速度;4)提供了OpenCV中undistort和remap函数
本文介绍了一个基于OpenCV的高性能鱼眼相机图像矫正工具,支持实时视频处理。该方案通过预计算映射表缓存和OpenCL GPU加速技术,将处理速度提升10-100倍,4K分辨率单帧延迟仅20ms,1080p延迟低至5-10ms。支持PINHOLE、FISHEYE等多种相机模型和14参数畸变模型,通过JSON文件灵活配置参数。关键技术包括:相机参数管理、映射表预计算与缓存、OpenCL加速等,解决了
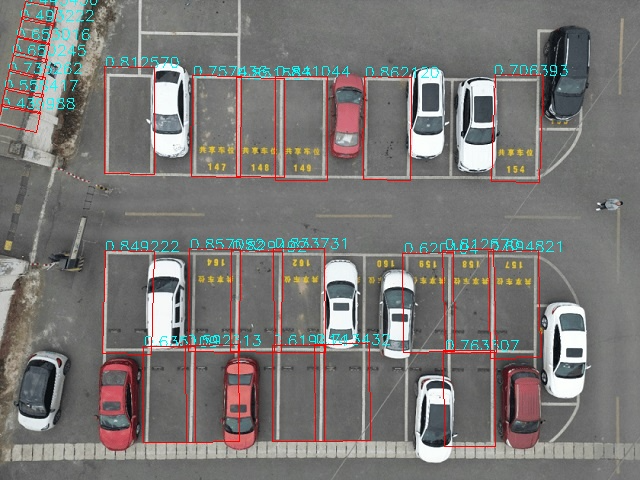
基于HISI3519dv500的yolov8-obb车位检测
基于rk3568/3588的电梯系统开发 - yolo11模型训练与部署

20多类不同的表计识别流程和简单概述
在智慧城市与智能物业高速发展的今天,电梯作为垂直交通的核心设施,其安全管理、应急响应能力正逐渐迈向“全联动、智能化”的新阶段。应运而生,目前我们已将系统的,并。
20多类不同的表计识别流程和简单概述
本文介绍了一个基于OpenCV的高性能鱼眼相机图像矫正工具,支持实时视频处理。该方案通过预计算映射表缓存和OpenCL GPU加速技术,将处理速度提升10-100倍,4K分辨率单帧延迟仅20ms,1080p延迟低至5-10ms。支持PINHOLE、FISHEYE等多种相机模型和14参数畸变模型,通过JSON文件灵活配置参数。关键技术包括:相机参数管理、映射表预计算与缓存、OpenCL加速等,解决了
RV1126B 交叉编译opencv/ffmpeg
鱼眼镜头通过特殊光学设计提供180°甚至更广的视野,广泛应用于全景相机、自动驾驶等领域。然而,这种广角特性会引入严重的桶形畸变,导致直线边缘弯曲,物体尺寸被拉伸。鱼眼镜头矫正的目标是将畸变图像还原为接近人眼视觉的正常图像,便于后续处理。矫正原理基于镜头成像的数学模型,鱼眼镜头的畸变本质是三维空间点投影到二维图像平面时的非线性变换。通过数学公式描述这种畸变,并通过逆变换还原真实坐标。OpenCV采用
