




- @majingming123
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
ROS-运行gazebo加载机器人模型报错
Cursor没有你想要的 Skill?自己写一个。Skill 的本质是一个说明文档,不需要写代码,会 Markdown 就够了。Skill 的本质就是一个文件夹,里面放一个SKILL.md,告诉 OpenClaw「遇到什么情况、按什么步骤干活」。不需要写代码,不需要懂 API,会写 Markdown 就够了。复杂一点的 Skill 可以带脚本,但最小可用版本就是一个纯文本文件。Skill 更像是给
OpenSpec 是一个规范驱动的开发框架,用于 AI 编程助手。它帮助团队创建和管理代码规范、变更提案和项目结构。这个工具比较适合开发大的功能,小功能改造可能会浪费时间。对于一个大的功能,如果不用open spec,可能需要反复和curosr沟通,造成反复的代码更改;用了open spec,会先生成文档,你再review文档,如果不满意或者有其他变更或者更细的功能开放,继续和cusor描述,会自
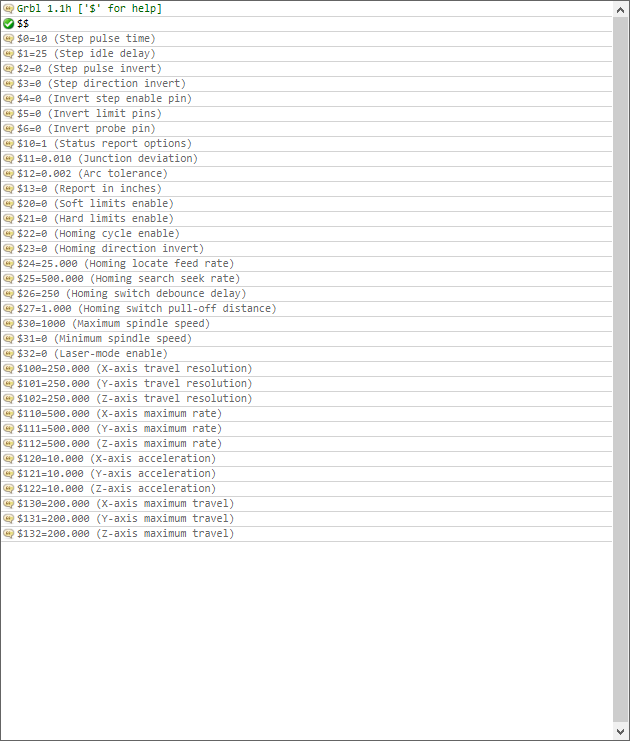
110=635.000(x max rate, mm/min) x轴最大速率 毫米/分钟。$111=635.000(y max rate, mm/min) y轴最大速率 毫米/分钟。$120=50.000(x accel, mm/sec^2) x轴加速度 毫米/(s*s)$121=50.000(y accel, mm/sec^2) y轴加速度 毫米/(s*s)$122=50.000(z accel
如果点击Start Stream。只能出现save和X。重新点击Start Stream,就可以看见图像了(此处我备困住许久,以为硬件问题。看到wifi已经链接成功;报错是因为闪光灯,可以不用管;登录:192.168.4.1。链接192.168.4.1。

查找相同网络
查看系统框架:uname -m # 查看系统 CPU 架构PC端默认安装GCC:是X86_x64架构的;开发板安装GCC:是arm架构的;因此在PC端使用默认的GCC编译的执行文件无法在arm开发板内执行;或者提示:“”——文件明明存在,为什么执行不了?
ROS中---既然已经有了odom,为什么还要IMU呢?在ROS机器人系统中,同时使用(里程计)和(惯性测量单元)进行姿态计算,主要是为了弥补单一传感器的局限性,实现更鲁棒、精准的位姿估计。
ubuntu20.04下ros之noetic的rviz无法显示多线激光雷达点云数据问题解决
这是st-link的示意图,缺口方向和实物方向一致,其中关注SWCLK,SWIO,3.3v,和gnd。将这四个端口连到对应的四线swd下载口 另外注意st-link没有供电能力,板子要单独供电,并且将3.3V电源反供给ST-LINK:如上图所示-->供电接入:1/2引脚为VCC;4/6/8/10/12/14/16/18/20引脚为GND;
