- @m0_62501117
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
存储 {键: 值} 对,键唯一且必须为不可变类型(如字符串、数字、元组),值可为任意类型。若元素均为不可变类型,元组可作为字典的键。可动态增删改元素(如append()、pop() 等方法),还提供排序sort()、反转 reverse() 等。可动态增删元素(但元素本身必须是不可变类型,如数字、字符串、元组)。像C语言和Matlab一样,变量名由字母、数字、下划线组成(但不能以数字开头,字母区分
信号数据常受噪声干扰,影响检测准确性。数据平滑处理旨在降低噪声同时保留信号特征。本文介绍了三种常用的平滑滤波方法:移动平均(Moving Average)、Savitzky-Golay滤波(SG滤波)和邻域平均滤波(Adjacent Averaging)。移动平均通过计算窗口内数据的均值来平滑噪声,适用于快速去除高频噪声,但可能导致峰形展宽和细节丢失。SG滤波基于局部多项式拟合,能保留信号高阶特征
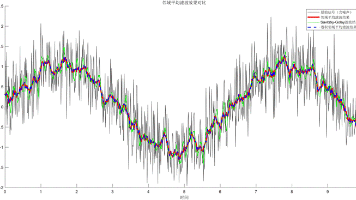
信号数据常受噪声干扰,影响检测准确性。数据平滑处理旨在降低噪声同时保留信号特征。本文介绍了三种常用的平滑滤波方法:移动平均(Moving Average)、Savitzky-Golay滤波(SG滤波)和邻域平均滤波(Adjacent Averaging)。移动平均通过计算窗口内数据的均值来平滑噪声,适用于快速去除高频噪声,但可能导致峰形展宽和细节丢失。SG滤波基于局部多项式拟合,能保留信号高阶特征
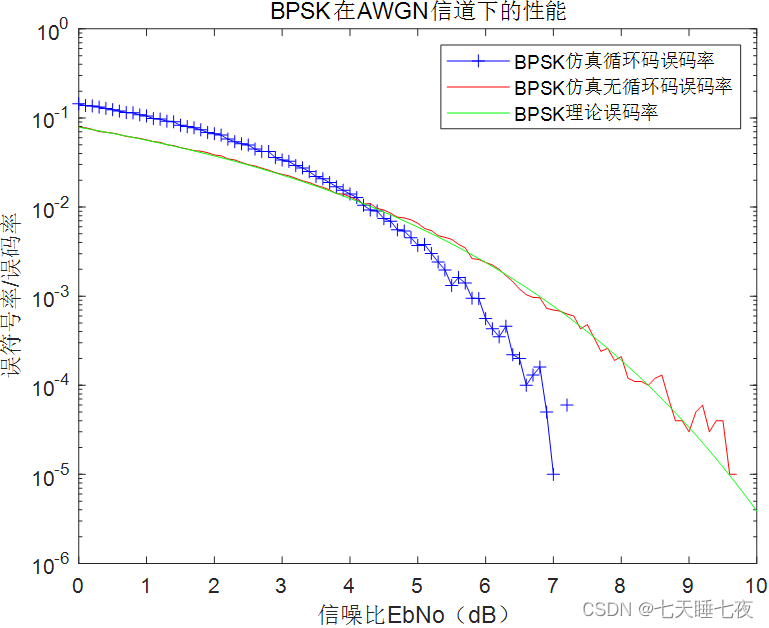
而经过循环码BCH(31,16)的BPSK仿真循环码误码率在信噪比达到一定值时,BPSK仿真循环码误码率要比BPSK理论误码率、BPSK仿真无循环码误码率要低几个数量级。legend("BPSK仿真循环码误码率","BPSK仿真无循环码误码率","BPSK理论误码率");(1)、构建在AWGN信道中,采用BPSK调制的分组差错控制编码方法的模型,并给出误码率性能。(1)构建在AWGN信道中,采用B
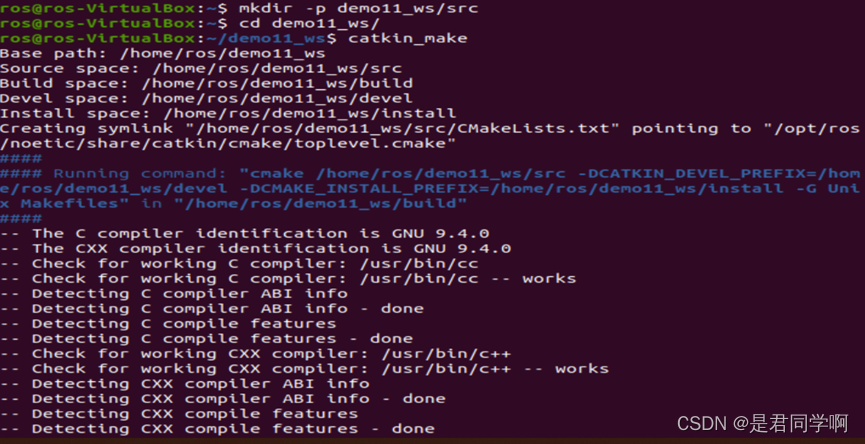
1、ROS快速体验-HelloWorld的实现ROS涉及的编程语言以C++和Python为主。以HelloWorld例程为开始,学习ROS开发的大致流程1.创建一个工作空间;2.创建一个功能包;3.编辑源文件;4.编辑配置文件5.编译并执行。在用C++与Python实现开发时,两者的区别主要是在步骤3和步骤4的实现细节上存在差异,其余的基本一致。1、创建一个工作区间并初始化首先会创建一个工作区间以