




- @m0_58857684
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
旅行商问题(TSP)是一个经典的组合最佳化问题,也被归类为NP难问题。多个旅行商问题(MTSP)代表了TSP的一个变体,与TSP相比更加复杂,具有更大的实际意义。MTSP在机器人、交通和网络等各个领域都有广泛的应用。同样,MTSP也是一个NP难问题。MTSP的优化目标是最小化所有旅行商的路径长度之和。为了解决这个问题提出了一种混合离散长鼻浣熊优化算法(HDCOA)。最初,采用扇区划分方法预先分配城
激光诱导击穿光谱(LIBS)是一种源自原子发射光谱的分析方法,能够从样品中快速获取化学成分信息。由于LIBS信号容易受到自吸收现象、样品基质和各种其他因素的干扰,如果没有适当的数据挖掘技术,定量和定性分析的准确性可能会受到损害。在这项工作中,LIBS与多元分析算法相结合,定量分析矿物的主要元素含量。使用ChemCam和SuperCam团队提供的地质参考样品数据集,引入了一种创新的建模方法,该方法结
基本的蜣螂算法通过模拟蜣螂在自然界中的四种行为(滚动、产卵、觅食和偷窃)来执行种群位置更新。在自然界中,蜣螂必须通过太阳导航,使其球滚动的路线尽可能直线。方程(1)用于原始论文中更新滚动蜣螂的位置:xi(t+1)=xi(t)+α⋅k⋅xi(t−1)+b⋅Δx(1)x_i(t + 1) = x_i(t) + \alpha \cdot k \cdot x_i(t - 1) + b \cdot \Del

高效的路径规划对于无人机(UAV)在可变的三维环境中执行复杂且紧急的任务至关重要。然而,传统的路径规划方法无法充分解决旋转运动与平移运动之间的耦合问题,并且欧拉角表示存在万向节锁奇异性问题。本文提出了一种基于双四元数的无人机三维路径规划新方法。通过使用单位双四元数表示无人机的姿态,建立了新的路径规划双四元数优化模型(PPDQOM),并将其转化为无约束的路径规划运动优化模型(PPMOM),有效消除了
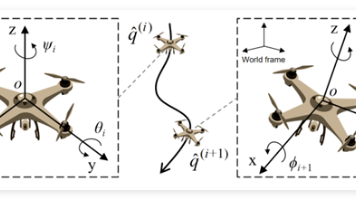
高效的路径规划对于无人机(UAV)在可变的三维环境中执行复杂且紧急的任务至关重要。然而,传统的路径规划方法无法充分解决旋转运动与平移运动之间的耦合问题,并且欧拉角表示存在万向节锁奇异性问题。本文提出了一种基于双四元数的无人机三维路径规划新方法。通过使用单位双四元数表示无人机的姿态,建立了新的路径规划双四元数优化模型(PPDQOM),并将其转化为无约束的路径规划运动优化模型(PPMOM),有效消除了
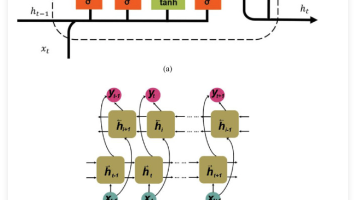
CNN-BiLSTM-Attention模型是一种在自然语言处理(NLP)任务中常用的强大架构,如文本分类、情感分析等。它结合了卷积神经网络(CNN)、双向长短期记忆网络(BiLSTM)和注意力机制的优势,能够捕捉局部特征和序列数据中的长程依赖关系。
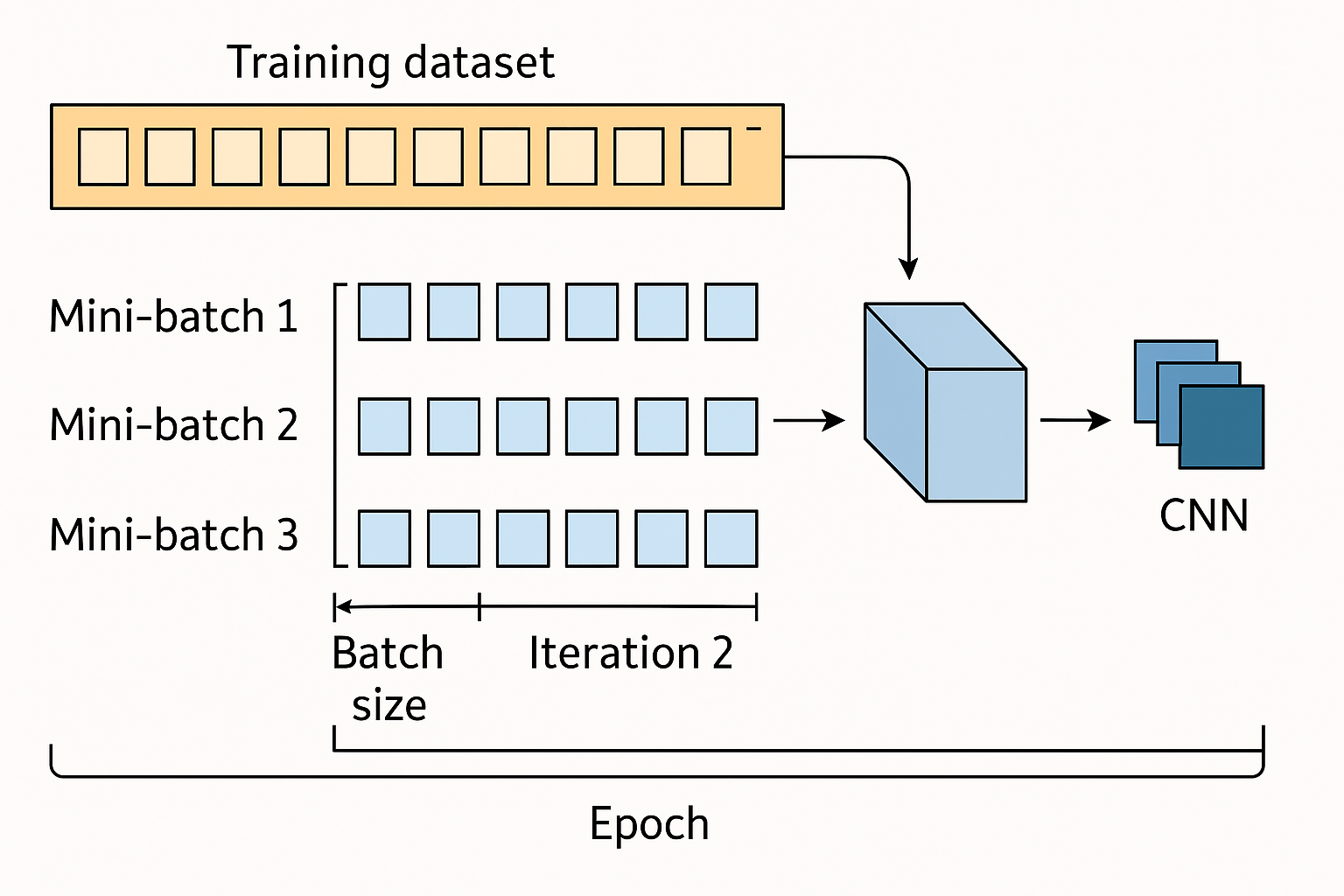
Batch Size是指在一次前向传播/反向传播中使用的训练样本数量。迭代次数是指完成一次完整的batch前向传播和反向传播所需的次数,也就是参数更新的次数。一个epoch表示整个训练数据集完整通过神经网络一次。Batch Size:决定每次参数更新使用的样本数,影响内存使用和梯度噪声迭代次数:完成一个epoch需要的参数更新次数,等于总样本数/batch sizeEpoch:完整遍历整个训练集的
Batch Size是指在一次前向传播/反向传播中使用的训练样本数量。迭代次数是指完成一次完整的batch前向传播和反向传播所需的次数,也就是参数更新的次数。一个epoch表示整个训练数据集完整通过神经网络一次。Batch Size:决定每次参数更新使用的样本数,影响内存使用和梯度噪声迭代次数:完成一个epoch需要的参数更新次数,等于总样本数/batch sizeEpoch:完整遍历整个训练集的
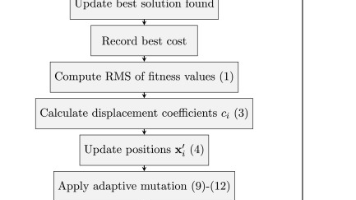
本文介绍了一种称为整体群优化(HSO)的新型无隐喻优化算法,旨在通过利用来自整个种群的数据来增强搜索过程。与依赖部分或局部信息的传统算法不同,HSO采用了一种综合方法,确保每个决策都由种群的整体分布和适应度景观来告知。该算法通过一个自适应框架动态平衡探索和开发,该框架集成了基于均方根(RMS)适应度的位移系数、基于模拟退火的选择和自适应变异。这种结构使HSO能够有效地导航复杂的多模态优化问题,同时
受到凤头豪猪(CP)各种防御行为的启发,用于精确优化各种优化问题,特别是那些具有大规模攻击的问题。从最不具攻击性到最具攻击性,冠豪猪使用四种不同的保护机制:视觉、声音、气味和物理攻击。第一和第二种防御技术(视觉和声音)反映了CPO的探索行为,而第三和第四种防御策略(气味和物理攻击)反映了CPO的剥削行为。所提出的算法提出了一种称为循环种群减少技术的新策略,以模拟并非所有CP都激活其防御机制,而只激
