




- @m0_53713033
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
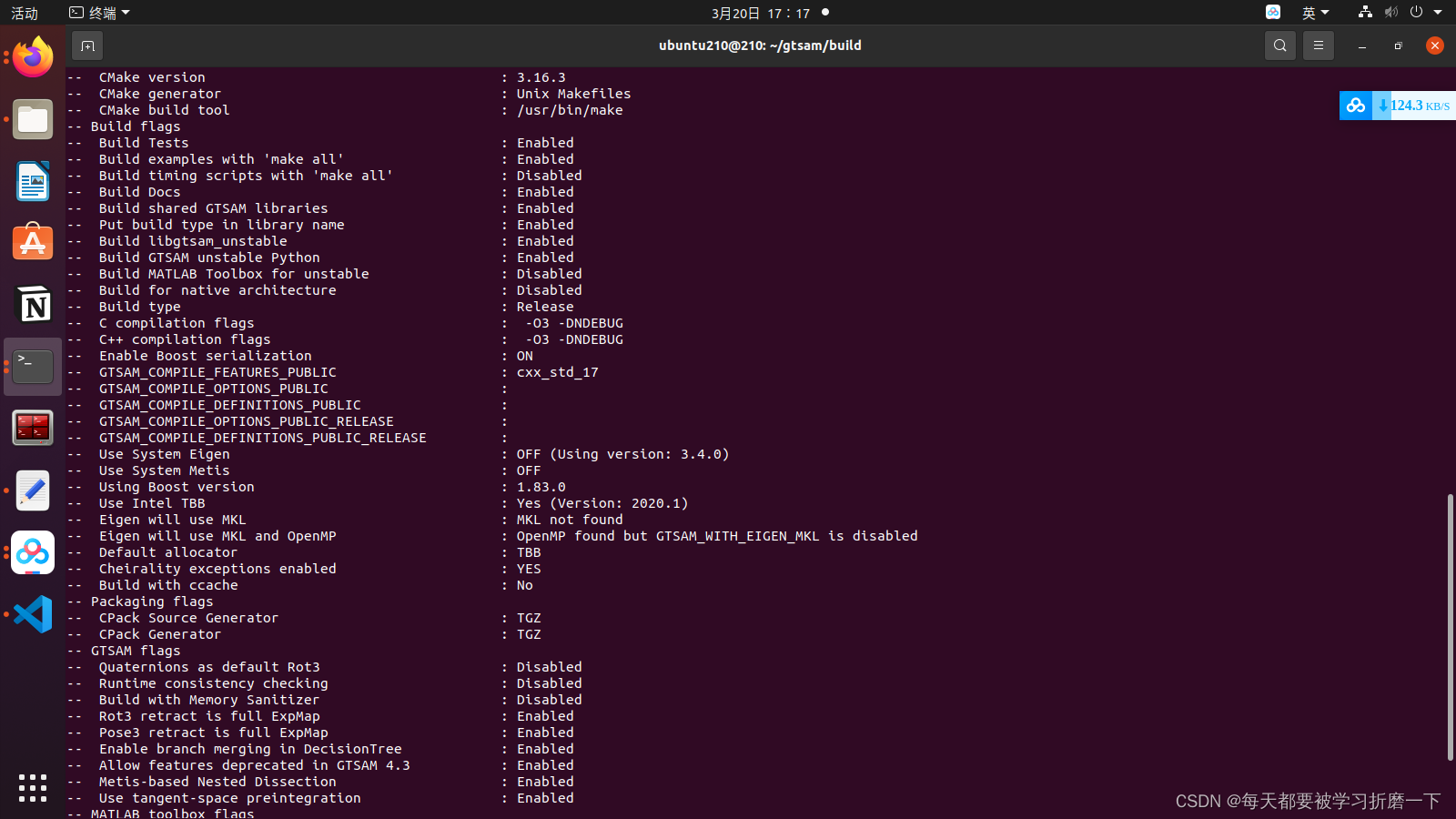
编译环境:ubuntu20.04+ros noetic + opencv 4.2.0 + gtsam4.0.3 + Ceres2.0.0(一定要注意版本信息,我复现的时候更换了三次的gtsam的版本,ceres-solver的版本也是进行了更换)解决办法:cmake/HandleEigen.cmake 在if(GTSAM_USE_SYSTEM_EIGEN)之前加入set(GTSAM_USE_SYS
3)roslaunch imu_utils xsens.launch (修改imu_utils/xsens.launch中imu_topic的value="/IMU_data"为自己imu的topic,参数max_time_min后面的value也要修改,比如我录制的时长是两个多小时,value=100)8.开始标定:下载code_utils、imu_utils(一定要先编译code_utils,

3)roslaunch imu_utils xsens.launch (修改imu_utils/xsens.launch中imu_topic的value="/IMU_data"为自己imu的topic,参数max_time_min后面的value也要修改,比如我录制的时长是两个多小时,value=100)8.开始标定:下载code_utils、imu_utils(一定要先编译code_utils,
深度学习复现——互相关运算,填充,步幅,多输入多输出

A Artificial Intelligent(AI),AI人工智能;B Blockchain,区块链;C Cloud Computing,云计算;D Big Data,大数据;N Network,网络;E Edge Computing,边缘计算;T Internet of Things,物联网;S Security,安全。DSSN:Data Switched Services Network数
sudo dpkg -i nomachine(nomachine版本,直接tab键补全即可)nomachine检查安装:sudo systemctl status nxserver。ubuntu下载选择deb。
Ubuntu 20.04 LTS 版本查询ros版本号:rosversion -d(noetic)roscore 报错:RLException:Invalidtag:Cannot load command parameter[roeversion]:command [['rosversion','roslaunch']]returned with code [1]解决办法:source /opt/
