




- @m0_47472749
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
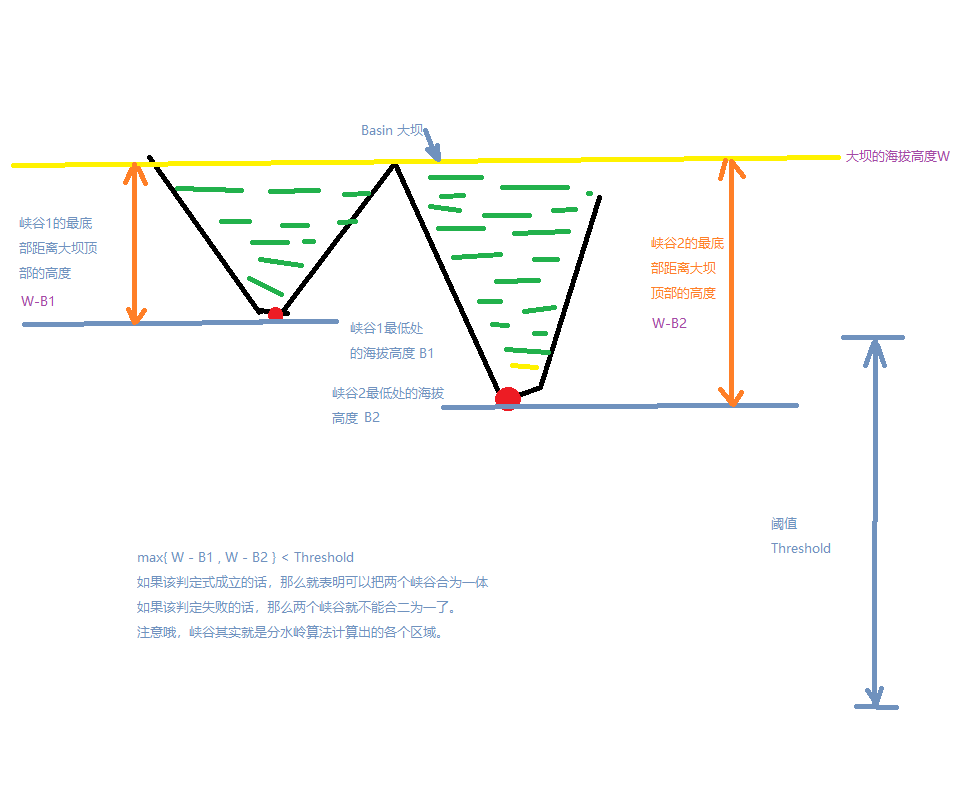
在以前的赌场中会有人出老千预先知道色子的点数,不清楚现在的国际赌场是否还有(话说我也不会去赌博的,哈哈哈哈哈哈)那么,本文就把这种用Halcon编写的实时识别色子点数的算法分享出来本文会有两个关于图像分割的核心算法:距离变换与分水岭算法即distance_transform (ConnectedRegions, DistanceImage, ‘octagonal’, ‘true’, 1000, 1
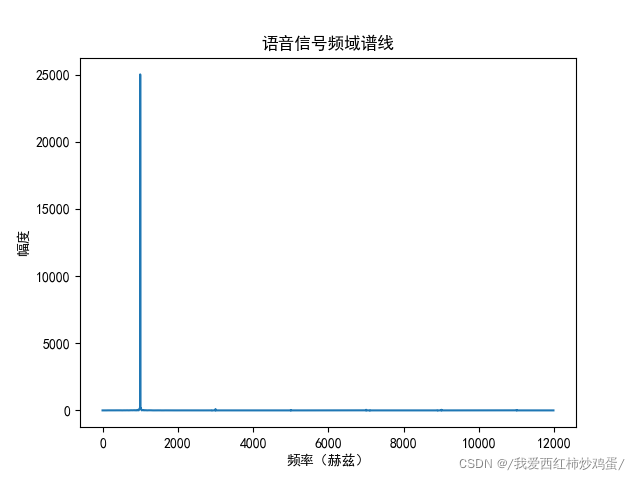
我有一段时长大约为3.34 s 频率为1khz 的连续音频。该音频输入一个设备,经转换输出后,我想判断该音频是否还连续。好了,这就是我的需求,看起来比较棘手,但我们稍稍了解音频采样率,码流,音频格式,通道的相关概念后,我们就可以用强大的python很快解决此问题。关于音频的相关概念,请参考以下文章:音频(一):时域图、 频谱图 Spectrum、 功率谱https://blog.csdn.net/
本文会详细介绍相机自动对焦的算法,即判别图像清晰度的图像处理算法_Laplace算法理论解析,以及阐述如何与运动控制结合进行实时确认相机焦距。开发不易,因此本文并未给出源代码,有需要的请单独私聊。首先,我们需要明确的是,为了确认相机的最佳焦距,相机的视野范围内必须是有足够的灰度差。如果灰度差基本没有,比如说一张白纸放在视野内,相机是对不了焦距的。所以基于灰度差,我们知道连续变化的黑白过度期间其一阶
本篇博客应该是属于开荒,因为很难找到C#版Opencv的文章。本文会详细讲解如何一步步配置OPENCVSHARP(C#中的OPENCV),并给出三个demo,分别是追踪算法CamShift以及Tracker在.NET C#中的实现,以及OPENCV 图像类OpenCvSharp.Mat与C# 图像类System.Drawing.Bitmap的互相转换。任意新建一个控制台程序,然后打开Nuget包管
如果了解过线阵相机的工作原理后,就会想要知道如何触发线阵相机拍照。无论何种触发方式,要保证线阵相机拍出的图片不压缩也不拉长,就要保证横向精度与纵向精度相等。这样每个像素的宽与高对应的世界尺寸是一样的。Ⅰ,在软触发下,以下面的公式开篇:横向精度=纵向精度横向精度=FOV(mm) / 线阵相机像元尺寸(无量纲常量)横向精度就是一个像素的宽对应世界范围的尺寸。线阵相机像元尺寸就是这个相机多少K的,一般分


本文是最新的opencv-python 安装教程。以前的一键安装 pip install opencv-python在新版本上并不能使用。本文会按照4步详细的介绍。opencv-python 版本:4.4.0Python 版本: 3.9第一步:打开cmd,进入到你的pip.exe 所在位置,即在你的python 安装路径里找到scripts文件夹,比如我的路径是:C:\Users\15162\Ap
以前写过opencv python的安装教程,后来有一些同学开始私信我如何安装及配置opencv c++。本文是以最新的版本入手,一步步详解opencv c++ 的安装及配置过程。:第一步,下载解压opencv 算法库进入到以下链接:https://opencv.org/releases/ , 点击Windows,即可下载。其他系统可忽略本教程。笔者下载的是opencv 4.4.0 ,如果想尝试预
以前写过opencv python的安装教程,后来有一些同学开始私信我如何安装及配置opencv c++。本文是以最新的版本入手,一步步详解opencv c++ 的安装及配置过程。:第一步,下载解压opencv 算法库进入到以下链接:https://opencv.org/releases/ , 点击Windows,即可下载。其他系统可忽略本教程。笔者下载的是opencv 4.4.0 ,如果想尝试预
本文是最新的opencv-python 安装教程。以前的一键安装 pip install opencv-python在新版本上并不能使用。本文会按照4步详细的介绍。opencv-python 版本:4.4.0Python 版本: 3.9第一步:打开cmd,进入到你的pip.exe 所在位置,即在你的python 安装路径里找到scripts文件夹,比如我的路径是:C:\Users\15162\Ap