




- @m0_37412775
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Ubuntu下深度学习环境配置Ubuntu下深度学习环境配置gpu驱动Anaconda安装功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPants创建一个自定义列表如何创建一个注脚注释也是必不可少的KaTeX数学公式新的甘特图功能,丰富你的文章UML 图表FLowchart流程图

目录准备工具系统盘制作安装系统前言此文仅以记录我安装时走过的坑,尽量将安装时的全过程保存下来。如果你是第一次安装Ubuntu系统,希望你静下心来,一步一步按以下步骤进行。如果运气爆棚/安装老手,恭喜你,15分钟就能装好。如果运行不好,恭喜你,准备好半天甚至装好后再卸载又重装的心理准备。我走过的重点的坑:1. 截止2020年10月29日。最好安装Ubuntu20.04,我装了Ubuntu20.10后
网上对时序问题的代码详解很少,这里自己整理对CNN和RNN用于时序问题的代码部分记录,便于深入理解代码每步的操作。一、1D-CNN1. Conv1d的接口class torch.nn.Conv1d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True)in_chann
(自用整理,其中一些基本要求未写出,e.g.所有参考文献需在文中提及,manuscript需进行拼写检查和语法检查等未写出)本文仅针对technical papers,不包括survey, ommentaries, letters.投稿要求的原始文件:https://www.aliyundrive.com/s/fr3z2khhBXq1. Declaration of competing inter
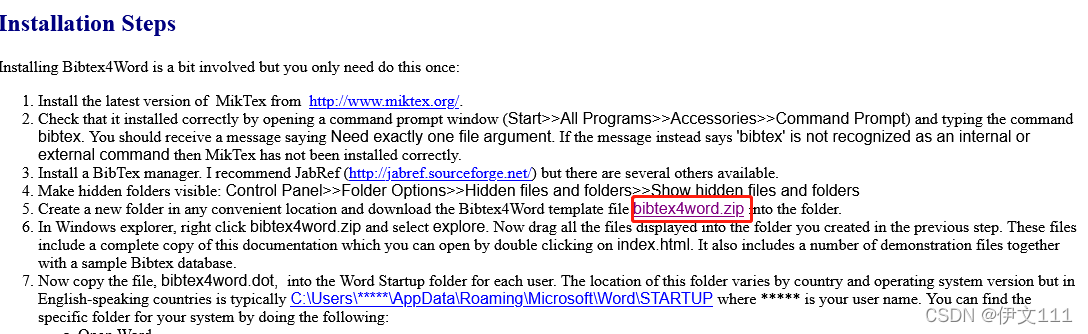
从latex转word...使用bib管理参考文献用习惯了。在word中如何将bib中的参考文献插入呢?——可使用Bibtex4word工具。1. 准备工作准备好待插入参考文献的word文档+bib文件。
英文科技论文写作中常见的问题和技巧没有捷径,不要偷懒一、写文章顺序Results and discussion(看图,清晰度,性能图)——Conclusion——Abstract——Experimental——Introduction(最难,一眼看出文章水平,关乎收录的关键所在,注意这里的创新点)二、语法检查软件1Checker, grammarly(科学),ginger(科学)三、时态问题“We
STARK代码学习笔记前言一、环境安装二、设置项目路径三、训练STARK四、测试STARK1. 下载预训练模型2. 准备测试数据集五、STARK代码细节前言本文记录了STARK代码学习阶段的步骤,核心内容从原作者的github中搬运,对于部分内容(如不同数据集的测试语句)仅以一个为例进行展示,详细请查看原github页面。code链接:https://github.com/researchmm/S
Ubuntu下深度学习环境配置Ubuntu下深度学习环境配置gpu驱动Anaconda安装功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPants创建一个自定义列表如何创建一个注脚注释也是必不可少的KaTeX数学公式新的甘特图功能,丰富你的文章UML 图表FLowchart流程图
