




- @lovod
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
【警告】Ubuntu 20.04环境升级风险提示:安装动态壁纸可能导致显卡驱动、CUDA和ROS环境损坏
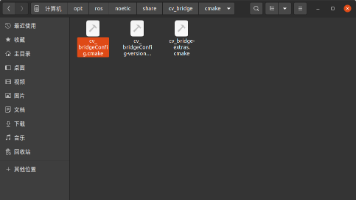
总所周知,当我们在ros中使用opencv加载onnx文件时可能会遇到加载模型失败的情况,这大概率是因为ros-noetic自带的ros版本是4.2.0 ,版本太低导致的,这时候就需要使用新版本的opencv。1. 按下“ctrl + F”搜索include就可以很快找到,将原来的注释掉,红线部分改为自己下载好的新版本的opencv的对应路径。防止你们认错,这里的路径下文件长这样(注意,这一步不要
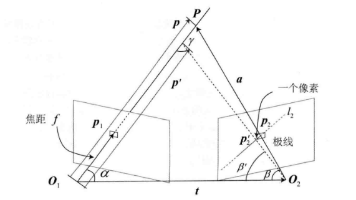
本文介绍了从稀疏路标点到稠密地图构建的关键技术。针对单目相机无法直接获取深度信息的问题,提出通过极线搜索和块匹配实现稠密重建。具体采用SAD、SSD和NCC三种相似度度量方法进行像素块匹配,并利用深度滤波器将观测信息融合到高斯分布中,逐步优化深度估计。通过推导几何不确定性模型,设定收敛阈值判断深度数据稳定性。最后给出基于OpenCV和Sophus的代码实现框架,包括极线搜索、深度滤波更新等核心功能
总所周知,当我们在ros中使用opencv加载onnx文件时可能会遇到加载模型失败的情况,这大概率是因为ros-noetic自带的ros版本是4.2.0 ,版本太低导致的,这时候就需要使用新版本的opencv。1. 按下“ctrl + F”搜索include就可以很快找到,将原来的注释掉,红线部分改为自己下载好的新版本的opencv的对应路径。防止你们认错,这里的路径下文件长这样(注意,这一步不要
介于在一些情况下,未完全删除nvidia和cuda的残留可能导致再次安装失败,故写此文。
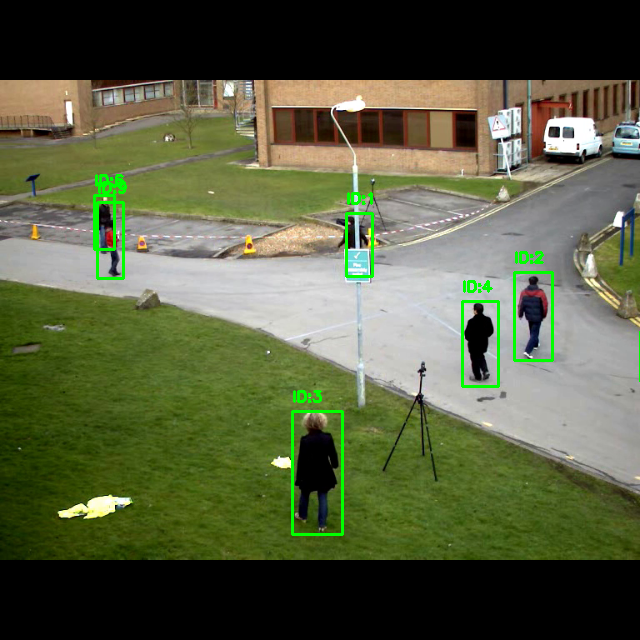
确定状态:先进行级联匹配,对于指定帧数内,按照丢失次数多少排优先级,按优先级和对应的Detection进行匹配,未匹配上的进入iou匹配,对于丢失的物体,连续丢失超过阈值才进行舍弃。当检测到一个物体,对其直接进行iou匹配,如果没有对应的detection,初始化一个新的Track。–中心坐标(cx, cy), 高宽比r, 高h, 以及各自的速度变化值。根据上一时刻(t - 1)的状态估计值来预测
本文将对如何快速获取属于自己的模型展开简要介绍,从数据准备、模型训练到最终部署,一步步助力大家迅速领略深度学习的独特魅力。
