




- @long630576366
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
cv::Mat img1(h, w,CV_8UC3);cv::Mat img1(h, w,CV_8UC3, data);一般cv::mat 初始化后数据内存 data 段都是连续的, 可以用isContinuous()函数判断存储是否连续。切记!切记!切记!不连续不能当一维数组处理一般经过裁剪的Mat图像,都不再连续了,如cv::Mat crop_img = src(rect);crop_img
PyTorch学习路径摘要 本文系统介绍了PyTorch的学习路径,分为基础、进阶、高级和专家四个阶段。基础部分涵盖张量操作(torch.Tensor)和神经网络模块(torch.nn.Module)的核心概念;进阶部分包括线性层、优化器和数据加载;高级部分涉及卷积网络和预训练模型;专家阶段则深入自动微分和分布式训练。重点讲解了torch.Tensor的多维数组特性及其数学运算、索引方法,以及to
假设有M个真值正样本,我们从Top-1 到 Top-N,每累积一个预测就会对应一个recall 和 一个 precision。,M/M),对每一个recall,从对应的precision 中取最大值作为当前recall 对应的precision,求M 个precision的平均得到AP。一般用 IOU 进行匹配,预测框和真实框之间的 IOU 值大于一定阈值时,比如0.5,则认为对真实样本正确预测。
cv::Mat img1(h, w,CV_8UC3);cv::Mat img1(h, w,CV_8UC3, data);一般cv::mat 初始化后数据内存 data 段都是连续的, 可以用isContinuous()函数判断存储是否连续。切记!切记!切记!不连续不能当一维数组处理一般经过裁剪的Mat图像,都不再连续了,如cv::Mat crop_img = src(rect);crop_img
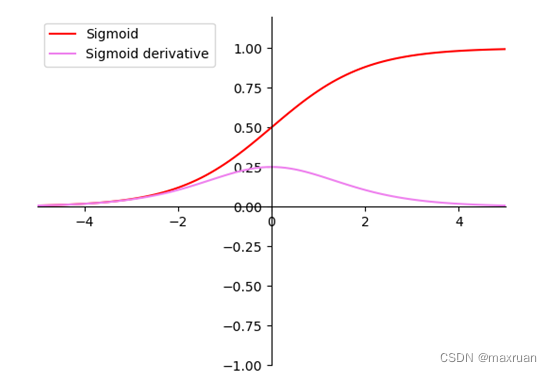
激活函数的目的就是:梯度为0, 无法反向传播,导致参数得不到更新:随着数据的变化,梯度没有明显变化:梯度越来越大,无法收敛梯度消失问题:1、反向传播链路过长,累积后逐渐减小2、数据进入梯度饱和区如何解决:1、选正确激活函数,relu, silu2、BN 归一化数据3、 resnet 较短反向传播路径4、LSTM 记忆网络。
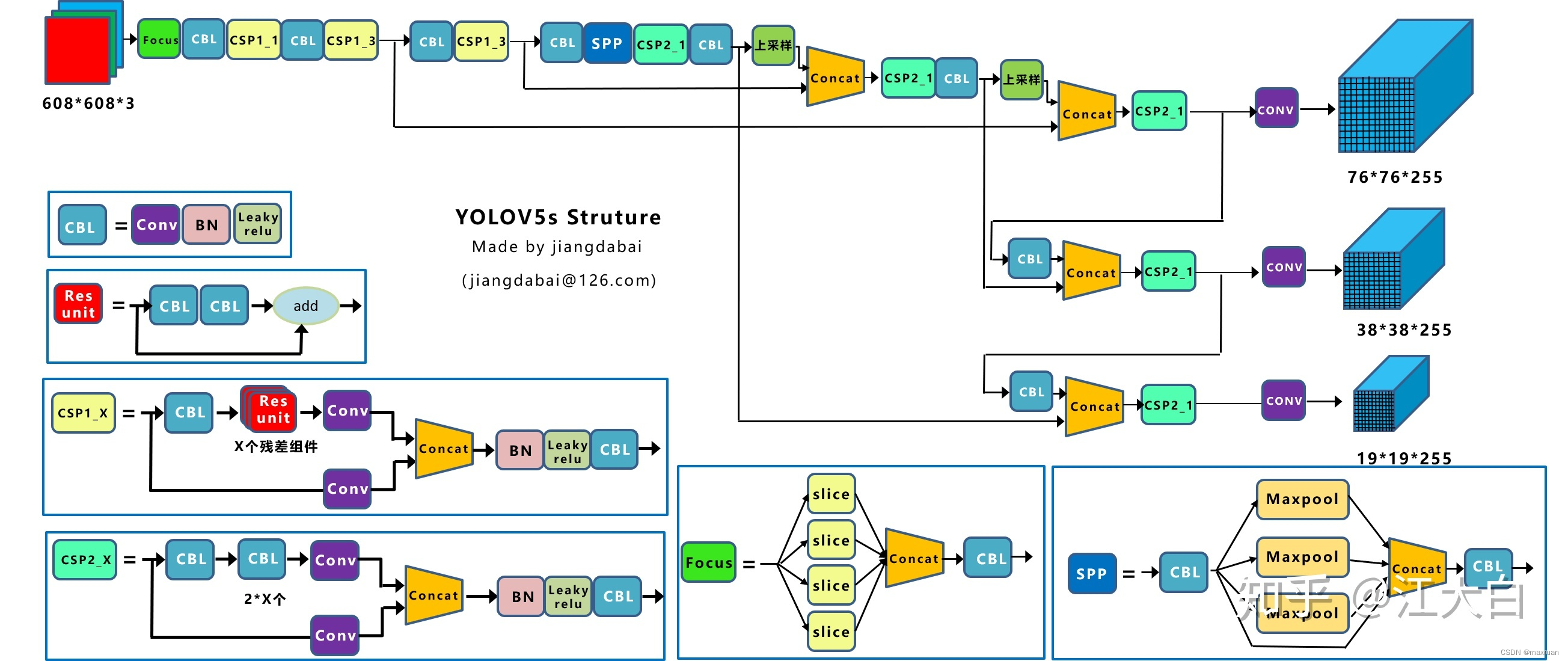
正样本匹配:寻找负责预测真值框的先验框 (不负责的作为负样本或丢弃)正样本寻找过程:与以往的用IOU匹配不同,yolov5用如下2步骤进行正样本匹配:1、先验框尺寸匹配:目标框与先验框的宽比值、高比值的最大值 小于一定阈值,则为正匹配。
cv::Mat img1(h, w,CV_8UC3);cv::Mat img1(h, w,CV_8UC3, data);一般cv::mat 初始化后数据内存 data 段都是连续的, 可以用isContinuous()函数判断存储是否连续。切记!切记!切记!不连续不能当一维数组处理一般经过裁剪的Mat图像,都不再连续了,如cv::Mat crop_img = src(rect);crop_img
显卡对应算力。GeForce RTX 3070, 3080, 3090ARCH= -gencode arch=compute_86,code=[sm_86,compute_86]
假设有M个真值正样本,我们从Top-1 到 Top-N,每累积一个预测就会对应一个recall 和 一个 precision。,M/M),对每一个recall,从对应的precision 中取最大值作为当前recall 对应的precision,求M 个precision的平均得到AP。一般用 IOU 进行匹配,预测框和真实框之间的 IOU 值大于一定阈值时,比如0.5,则认为对真实样本正确预测。
【代码】openCV上图片显示中文c++
